
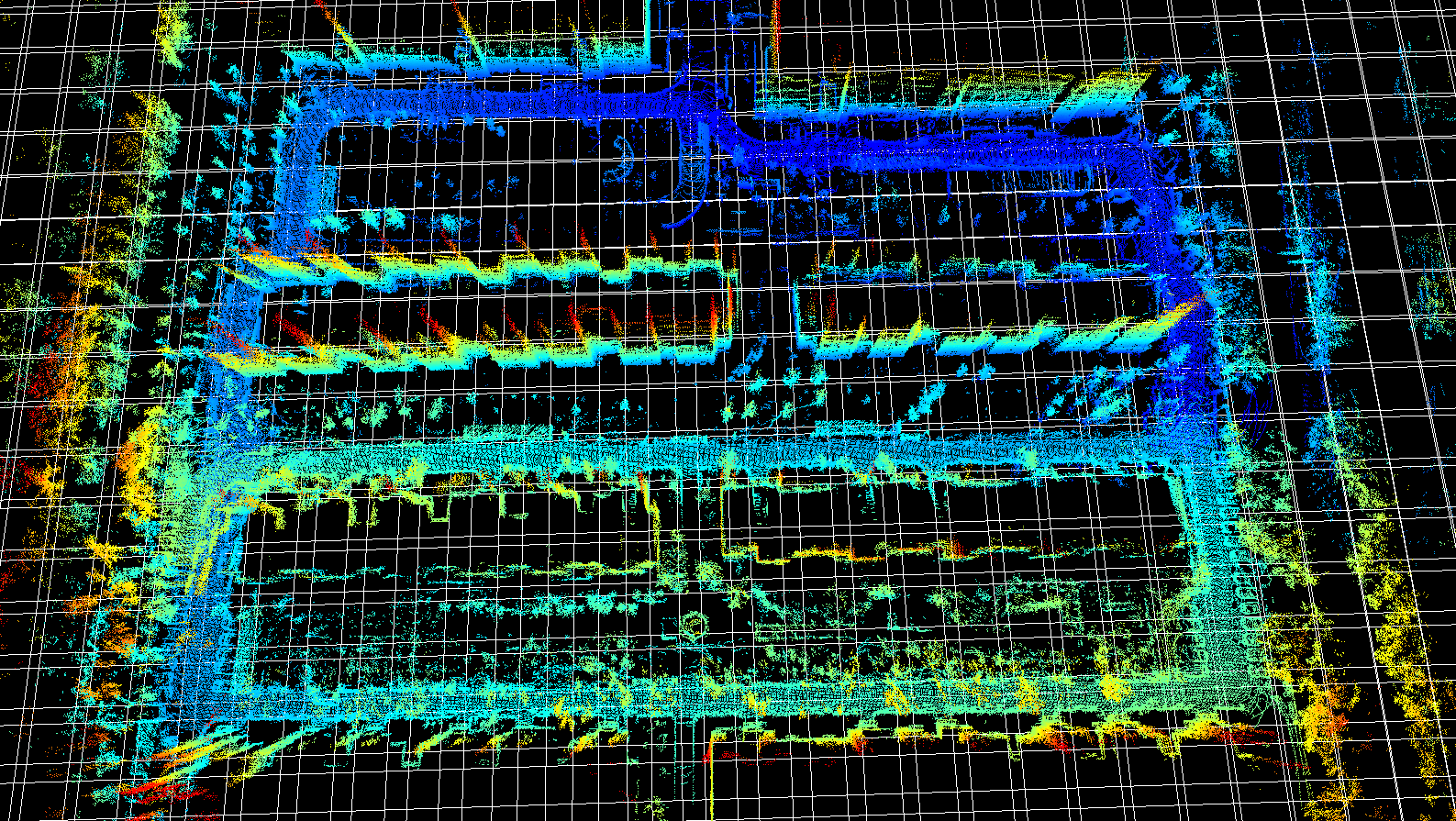
最近4D毫米波雷达的产品化应用越来越广泛,多家自动驾驶、辅助驾驶的产品开始量产装车4D Radar,由于它价格低廉(千元左右),探测距离达到200米+,相比激光雷达能穿透烟尘,可以覆盖大雾、雪天等场景,甚至可以探测到视觉和激光因遮挡看不到的车辆和障碍物,随着技术的进一步发展迭代,未来有代替激光雷达的趋势,因此本文将对4D毫米波进行初步的研究,看看点云的输出密度和准确度上跟激光雷达有多大差异。
最近4D毫米波雷达的产品化应用越来越广泛,多家自动驾驶、辅助驾驶的产品开始量产装车4D Radar,由于它价格低廉(千元左右),探测距离达到200米+,相比激光雷达能穿透烟尘,可以覆盖大雾、雪天等场景,甚至可以探测到视觉和激光因遮挡看不到的车辆和障碍物,随着技术的进一步发展迭代,未来有代替激光雷达的趋势,因此本文将对4D毫米波进行初步的研究,看看点云的输出密度和准确度上跟激光雷达有多大差异。
由于博客里有很多摸索和尝试的文章,顺序可能会颠倒,为了方便大家系统性的学习,本文对自动驾驶车辆的系统性学习和实践应该按顺序看哪些文章进行了下整理。

我们在调试autoware.ai的过程中,有时会遇到某个三方模块异常退出,即没有log也没有生成coredump文件,本文就讲解下如何定位这类问题。

之前一直想梳理下领导力与人才特质方面的内容,拖的太久了,今天开始动笔整理。写完这句就感觉完成了50%了。哈哈 :)

最近在不同环境下进行lio-sam建图时,遇到一个问题:在通过狭窄道路时,两侧高耸的建筑反射卫星信号,导致出现RTK解算status=1/2 RTK增强定位时(1 SBAS_FIX星基增强系统修复,2 GBAS_FIX地基增强系统修复),仍然出现大幅度的位置漂移,从而导致GPS因子介入制图的位置出现错位。

本文对LIO-SAM:Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping论文进行研读。

一般来说,建图算法通常会使用IMU、Lidar、Camera、RTK等传感器数据,通过确定机器人的位置/速度/航向、点云去畸变、点云融合拼接等方法,构建一副完整的地图。地图是否精准,直接决定了机器人后续的定位导航能力。

C16系列激光雷达是镭神智能推出的一款高性能、小型化的16线混合固态激光雷达。这款雷达主要用于实现三维空间的精确感知,广泛应用于自动驾驶、机器人导航、无人机避障以及智能安防等领域。

生成式 AI(Artificial Intelligence Generated Content,AIGC)的兴起标志着信息技术行业进入了崭新的发展阶段,为社会进步和经济发展打开了巨大的想象空间。
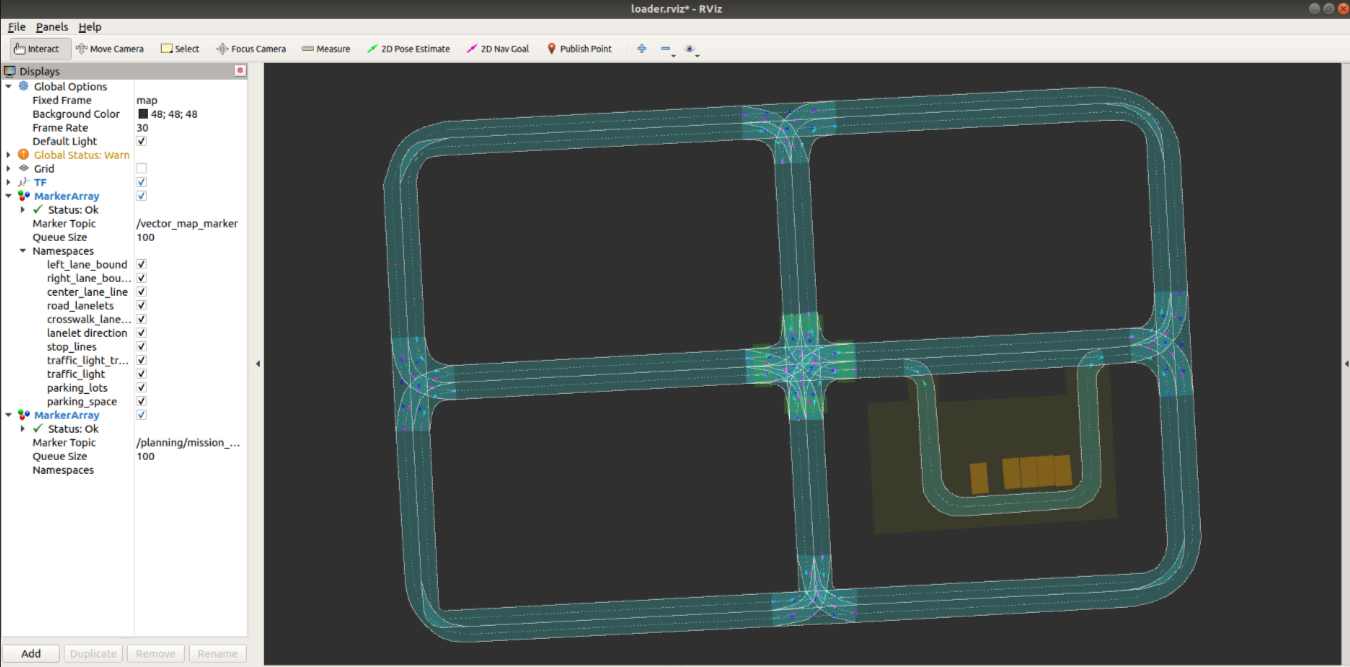
之前我们尝试了使用Unity的MapToolBox插件来绘制VectorMap地图,并在Autoware.ai版本中正常用于导航。由于Autoware.universe版本里有不少不错的能力,但是它只支持Lanelet2地图,另外MapToolBox插件缺乏红绿灯等交通标识的支持,因此本文尝试使用TIER IV绘制Lanelet2的高精地图。

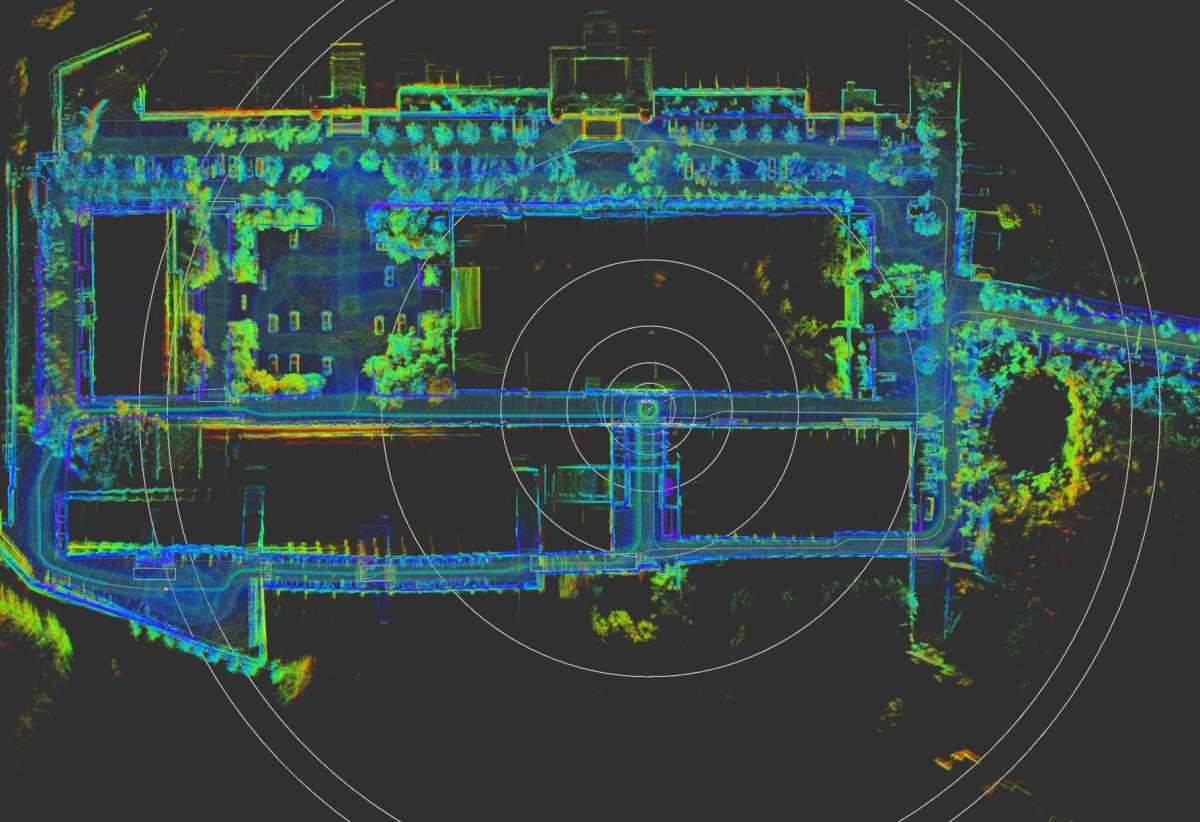
遇到采集的地图范围较大时,生成的点云地图也会比较大,例如我采集建图并进行0.1降采样的数据,PCD点云大约900M,这么大的点云points_map_loader是无法一次性加载并pub到topic给rviz展示的,必须进行点云分割和动态分块加载。本文就带大家一起尝试下解决方法。
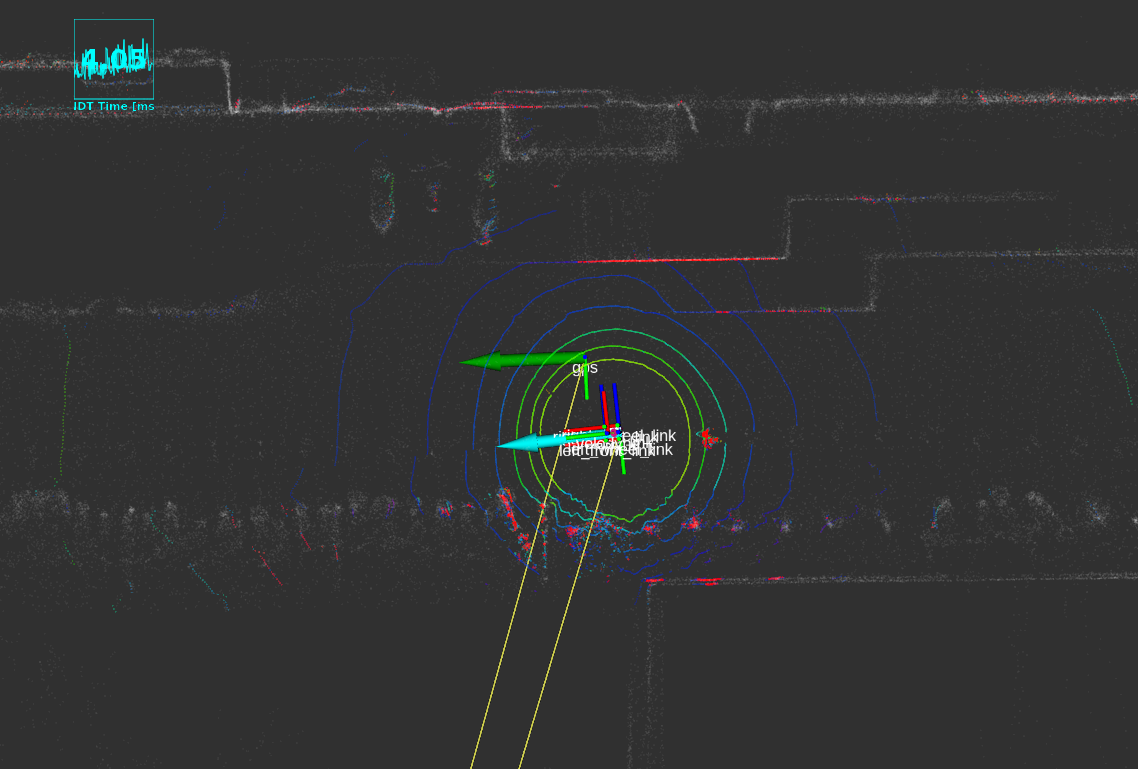
上一次,我们使用Autoware成功进行了ndt定位和导航,但是GNSS初始定位以及修正功能没有正常生效。行走途中遇到剧烈颠簸、非常狭小的空间、遮挡严重、或其他ndt局部定位特征不足时,ndt_matching会找不到自己位置导致定位飞。
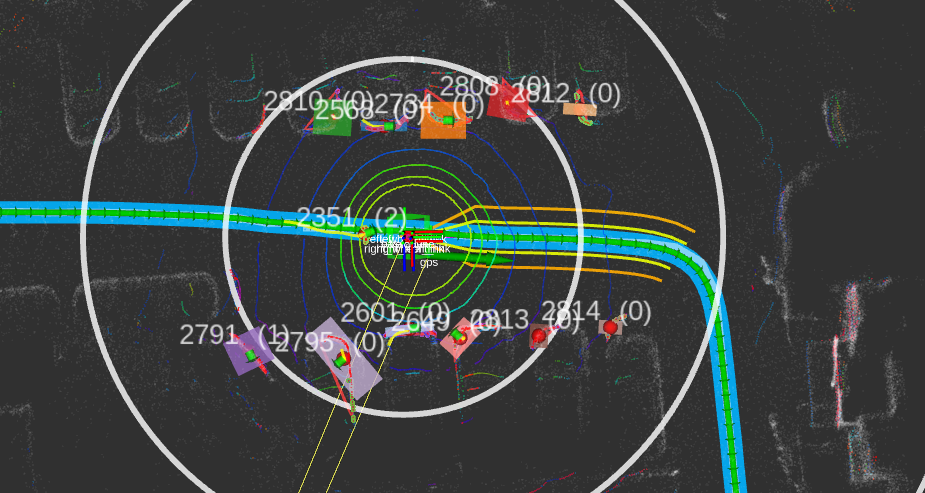
上一次,我们使用lio-sam、ndt-mapping分别尝试构建小区和公园的地图,今天我们继续下一步,地图来进行定位和导航的验证。
昨天在Ubuntu20.04电脑上调试一个算法,把内存打满了,系统卡死,强制重启后,出现登陆后1-2分钟后桌面卡死的现象,但是后台服务似乎一直在正常工作,反复重启了很多次都是这样,实在不想重装系统,这里记录下修复过程。

上一次,我们使用ndt-mapping构建了一个PCD点云地图,在开始Autoware的导航之前,单靠点云地图是不够的,我们需要先绘制矢量地图,来约束可行驶的区域、方向等,然后再继续导航环节的验证。
LIO-SAM对输入的点云/imu数据太敏感,道路距离过窄过宽都容易建图失败,在没有建筑物的公园基本用不了。因此本文尝试使用对特征点要求相对较少的ndt算法,来看看在小区或公园等场景的建图效果。
由于LIO-SAM在公园等树木多特征少的场景效果不太好,但NDT是集成在Autoware.ai 1.x版本里的,这里记录下部署编译过程。

今天新到一个G70 RTK定位模块,它支持多种卫星导航系统,包括中国BDS北斗,美国GPS,俄罗斯GLONASS、欧洲Galileo,日本QZSS卫星定位系统。G70内置RTCM更正,通过本地基站或网络 RTK设置中的虚拟参考站(VRS),可以支持厘米级定位。

全球卫星导航系统 (Global Navigation Satellite Systems,GNSS ),指基于卫星信号来确定用户接收机位置的系统。目前的全球卫星导航系统中,美国的 GPS系统和俄罗斯的 GLONASS系统处于完全运行状态,可以提供全球定位服务,中国的北斗系统 也于 2020 年完成。卫星导航系统 GNSS市场的快速增长,卫星导航系统 GNSS芯片向多模化的方向发展,即单一芯片支持多种卫星导航系统 GNSS系统,比如 GPS + GLONASS,GPS + Galileo,GPS + 北斗等等。
一台设备上有个docker容器,很好用,但是没有Dockfile,并且镜像hub是私有的不允许pull,但我想在另一台设备上使用这个镜像,应该怎么做呢?本文就介绍下操作方法。