之前我们尝试了使用Unity的MapToolBox插件来绘制VectorMap地图,并在Autoware.ai版本中正常用于导航。由于Autoware.universe版本里有不少不错的能力,但是它只支持Lanelet2地图,另外MapToolBox插件缺乏红绿灯等交通标识的支持,因此本文尝试使用TIER IV绘制Lanelet2的高精地图。
之前我们尝试了使用Unity的MapToolBox插件来绘制VectorMap地图,并在Autoware.ai版本中正常用于导航。由于Autoware.universe版本里有不少不错的能力,但是它只支持Lanelet2地图,另外MapToolBox插件缺乏红绿灯等交通标识的支持,因此本文尝试使用TIER IV绘制Lanelet2的高精地图。

遇到采集的地图范围较大时,生成的点云地图也会比较大,例如我采集建图并进行0.1降采样的数据,PCD点云大约900M,这么大的点云points_map_loader是无法一次性加载并pub到topic给rviz展示的,必须进行点云分割和动态分块加载。本文就带大家一起尝试下解决方法。

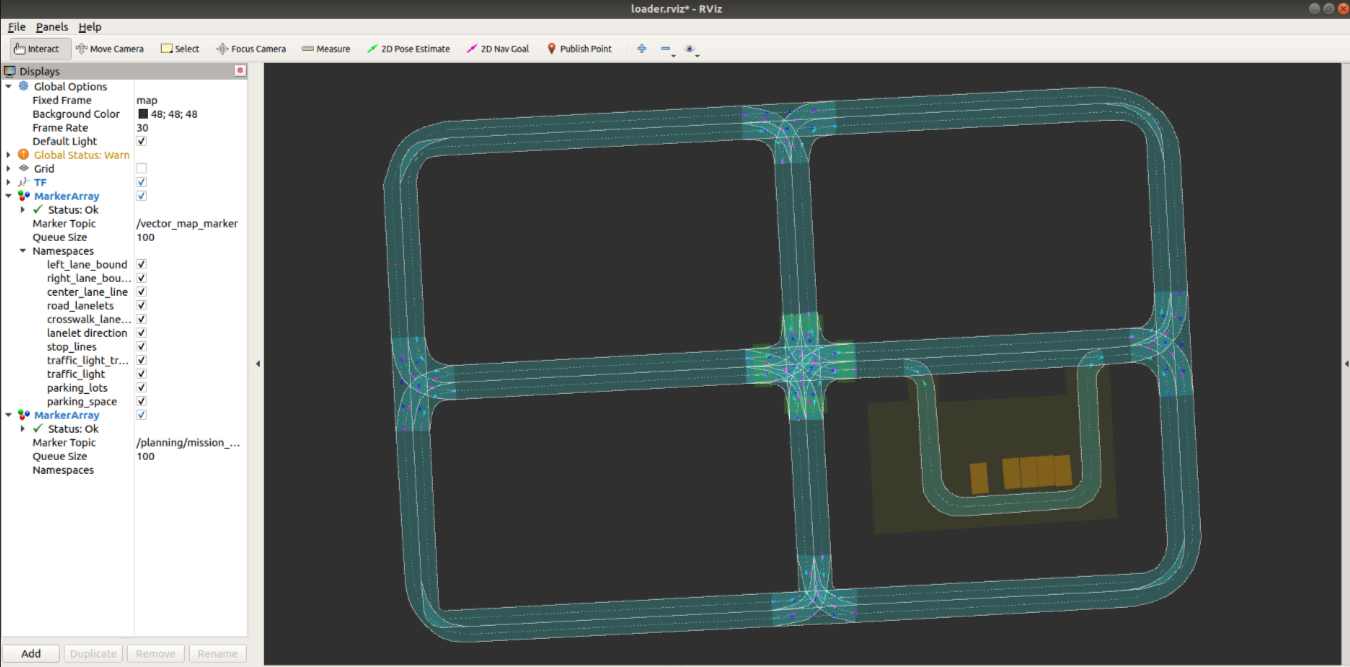
上一次,我们使用ndt-mapping构建了一个PCD点云地图,在开始Autoware的导航之前,单靠点云地图是不够的,我们需要先绘制矢量地图,来约束可行驶的区域、方向等,然后再继续导航环节的验证。