由于博客里有很多摸索和尝试的文章,顺序可能会颠倒,为了方便大家系统性的学习,本文对自动驾驶车辆的系统性学习和实践应该按顺序看哪些文章进行了下整理。
由于博客里有很多摸索和尝试的文章,顺序可能会颠倒,为了方便大家系统性的学习,本文对自动驾驶车辆的系统性学习和实践应该按顺序看哪些文章进行了下整理。

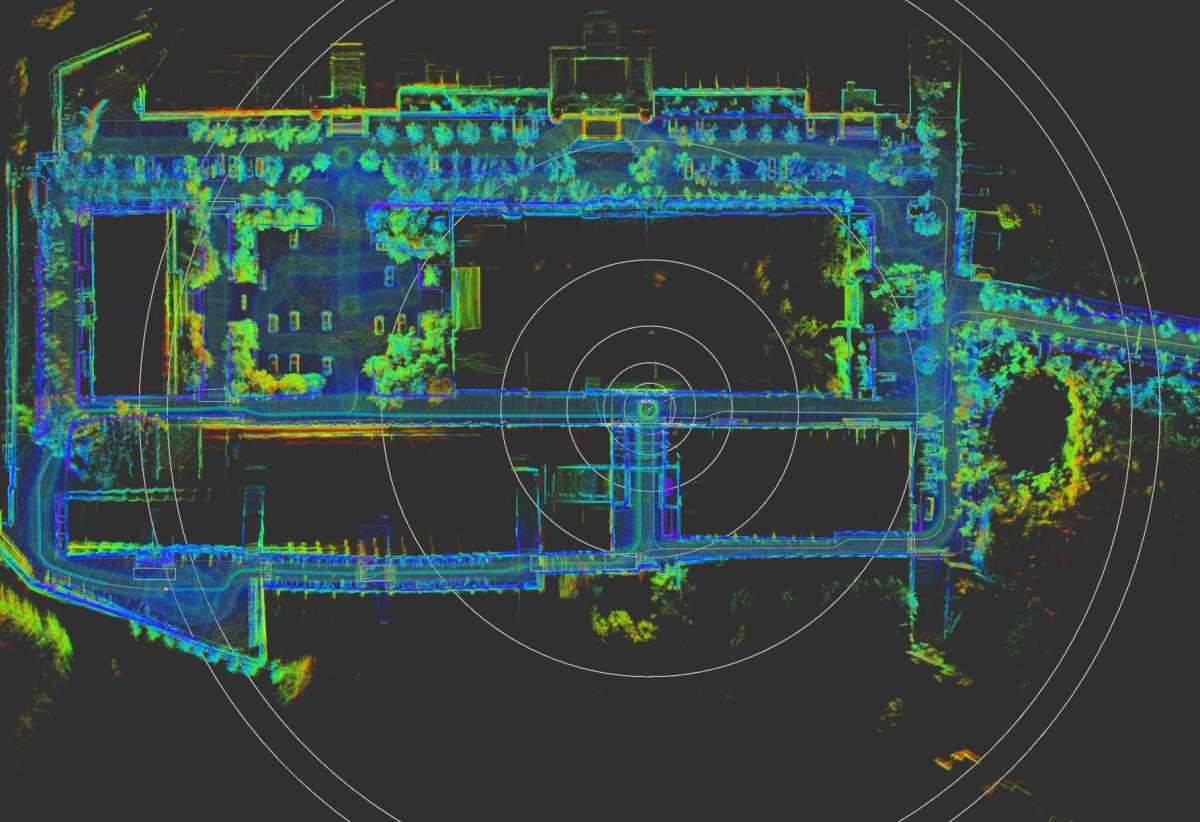
遇到采集的地图范围较大时,生成的点云地图也会比较大,例如我采集建图并进行0.1降采样的数据,PCD点云大约900M,这么大的点云points_map_loader是无法一次性加载并pub到topic给rviz展示的,必须进行点云分割和动态分块加载。本文就带大家一起尝试下解决方法。
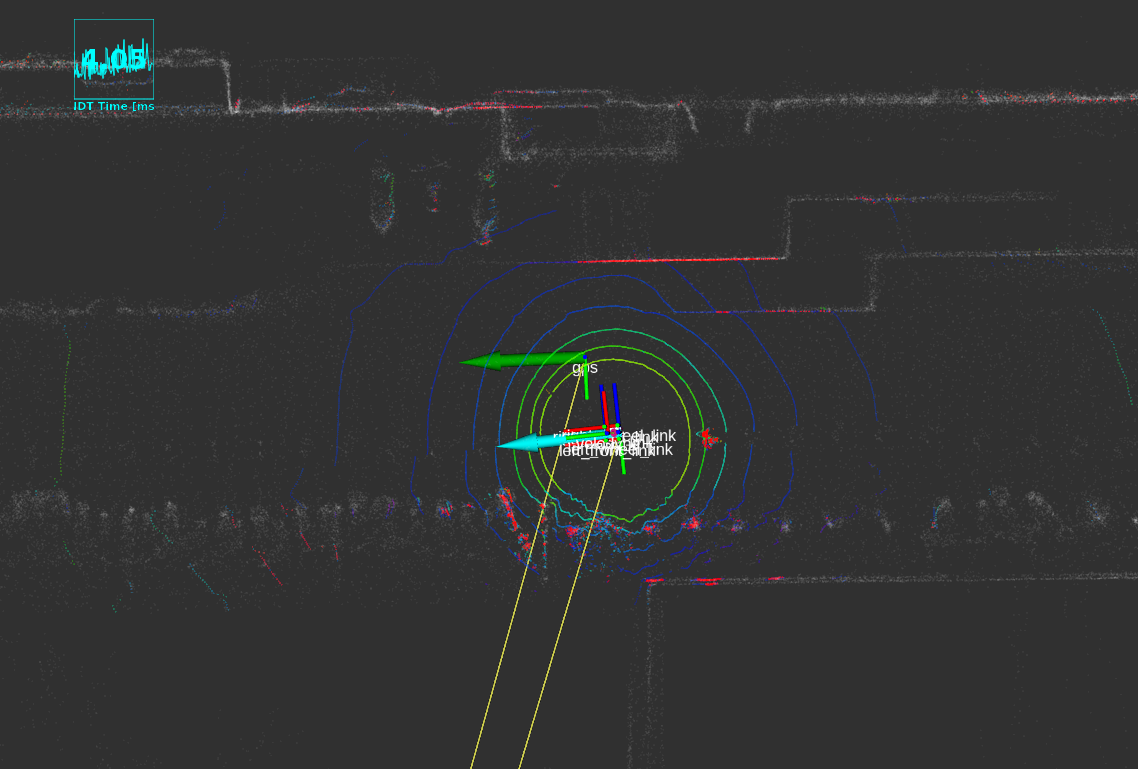
上一次,我们使用Autoware成功进行了ndt定位和导航,但是GNSS初始定位以及修正功能没有正常生效。行走途中遇到剧烈颠簸、非常狭小的空间、遮挡严重、或其他ndt局部定位特征不足时,ndt_matching会找不到自己位置导致定位飞。
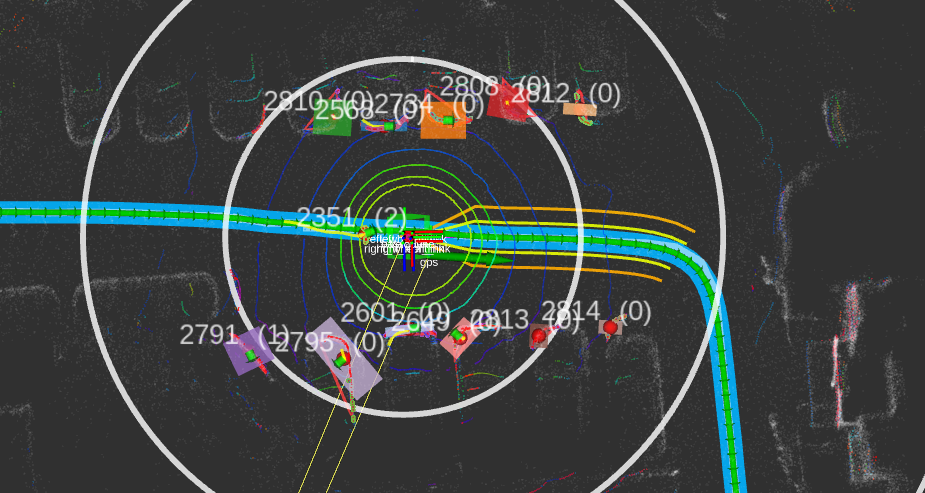
上一次,我们使用lio-sam、ndt-mapping分别尝试构建小区和公园的地图,今天我们继续下一步,地图来进行定位和导航的验证。

我们在docker内调试autoware.ai的过程中,有时会遇到某个三方模块异常退出,即没有log也没有生成coredump文件,本文就讲解下如何在定位这类问题。

上一次,我们使用ndt-mapping构建了一个PCD点云地图,在开始Autoware的导航之前,单靠点云地图是不够的,我们需要先绘制矢量地图,来约束可行驶的区域、方向等,然后再继续导航环节的验证。
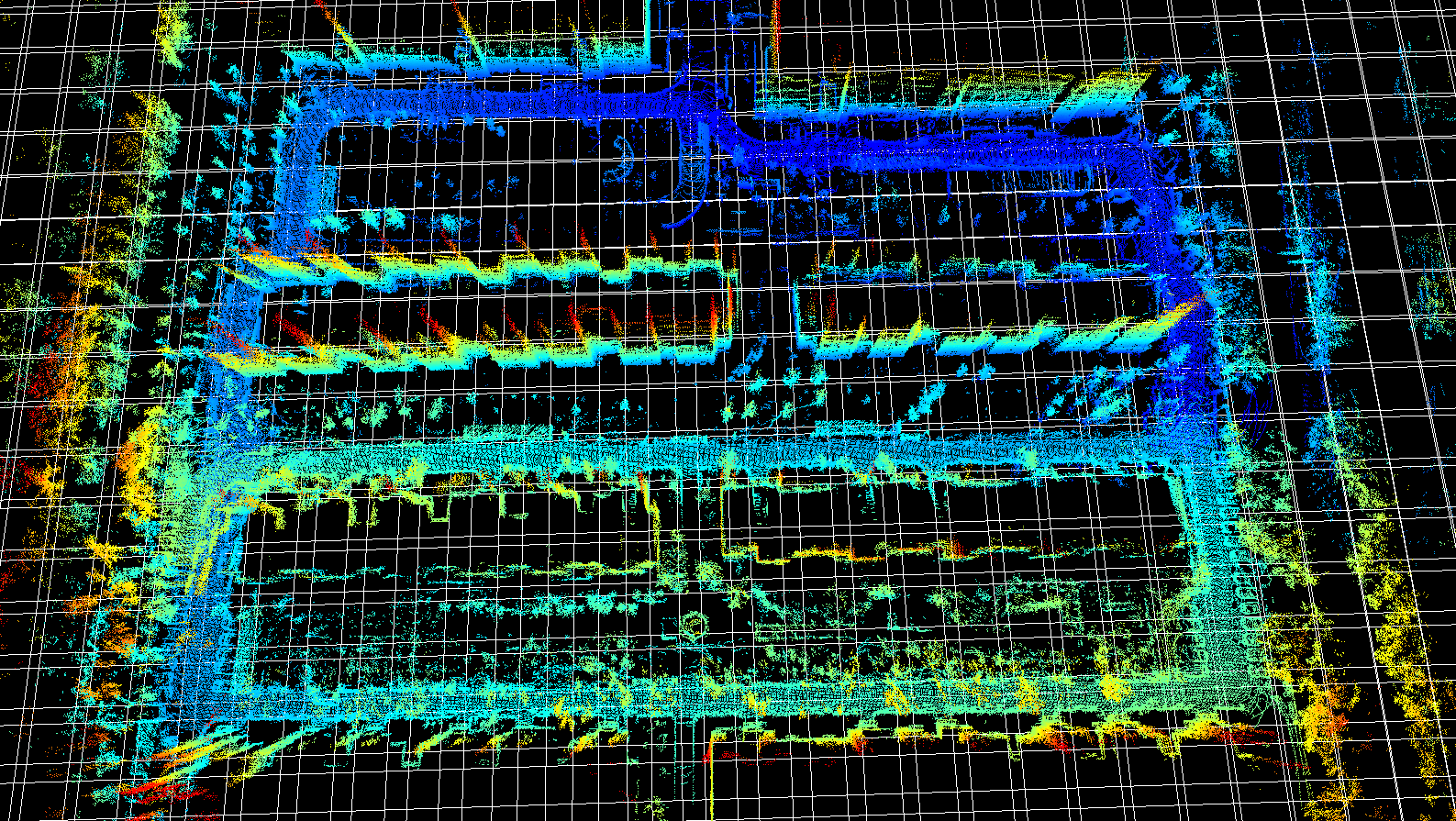
LIO-SAM对输入的点云/imu数据太敏感,道路距离过窄过宽都容易建图失败,在没有建筑物的公园基本用不了。因此本文尝试使用对特征点要求相对较少的ndt算法,来看看在小区或公园等场景的建图效果。
由于LIO-SAM在公园等树木多特征少的场景效果不太好,但NDT是集成在Autoware.ai 1.x版本里的,这里记录下部署编译过程。

新到一块Nvidia Jetson AGX Orin 32G的板子,想压测下GPU性能时发现里边没有带CUDA,重新刷下机,记录下刷机过程。
在 Ubuntu22.04 + Orin Arm 中构建 tensorrt_common 时,出现未找到 TENSORRT_NVPARSERS_LIBRARY 变量错误。
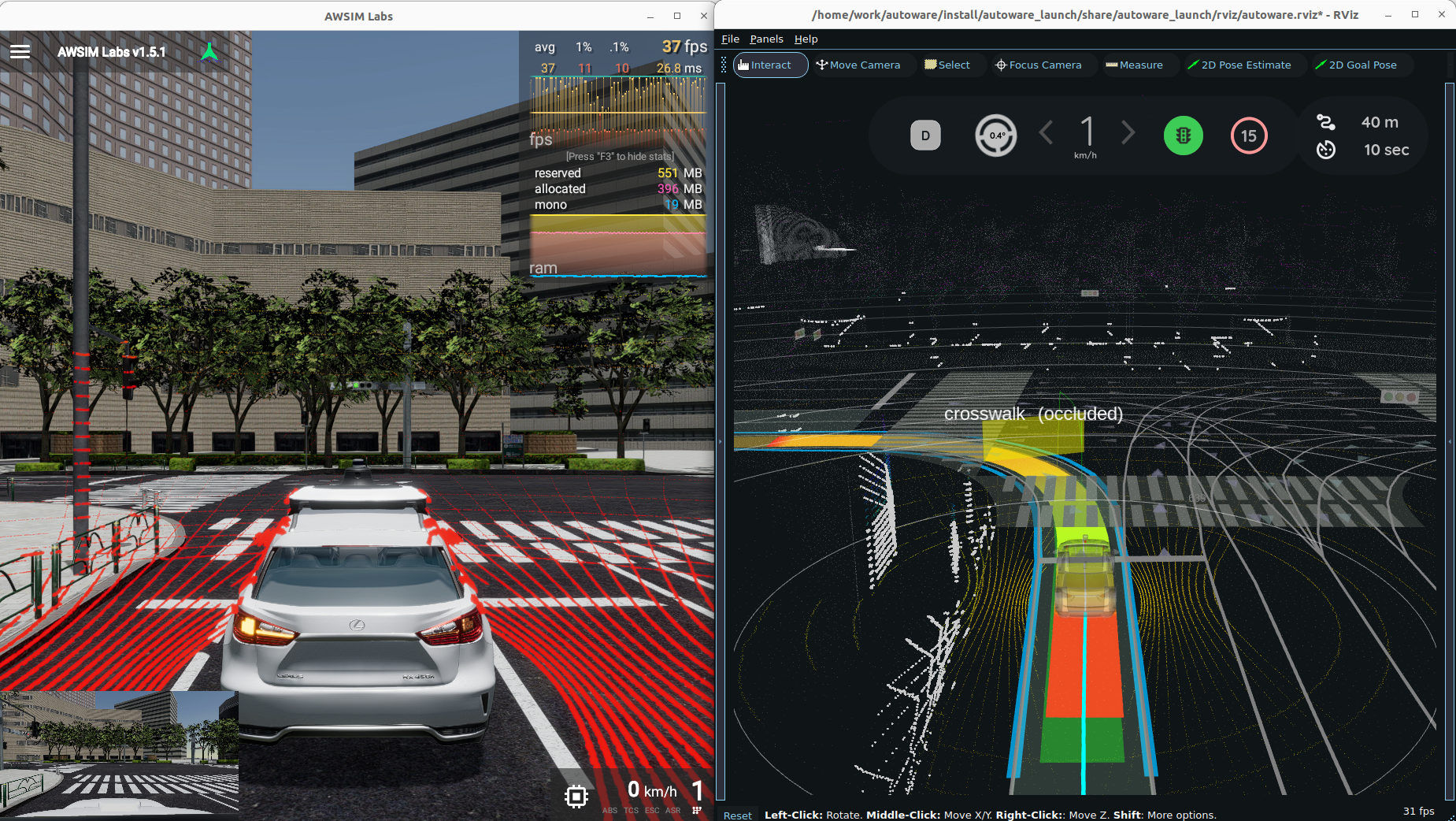
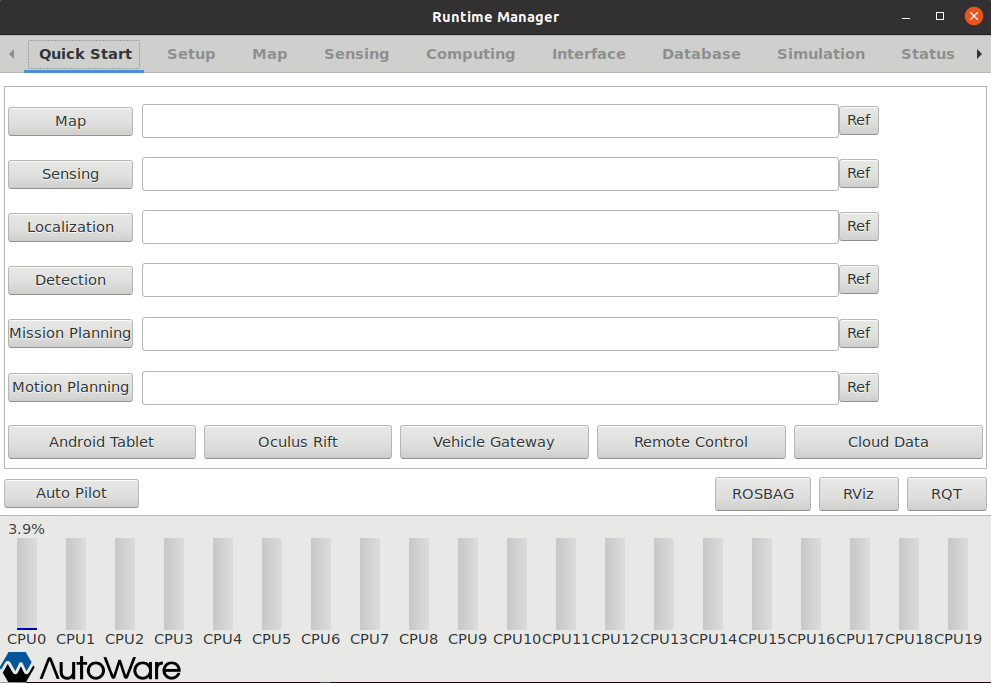
上次我们大概了解了Autoware是什么,以及它的基本原理。作为一个完备的自动驾驶框架,Autoware看起来很有吸引力,那么今天就带大家动手实践下,看它是不是像描述的那么好用。
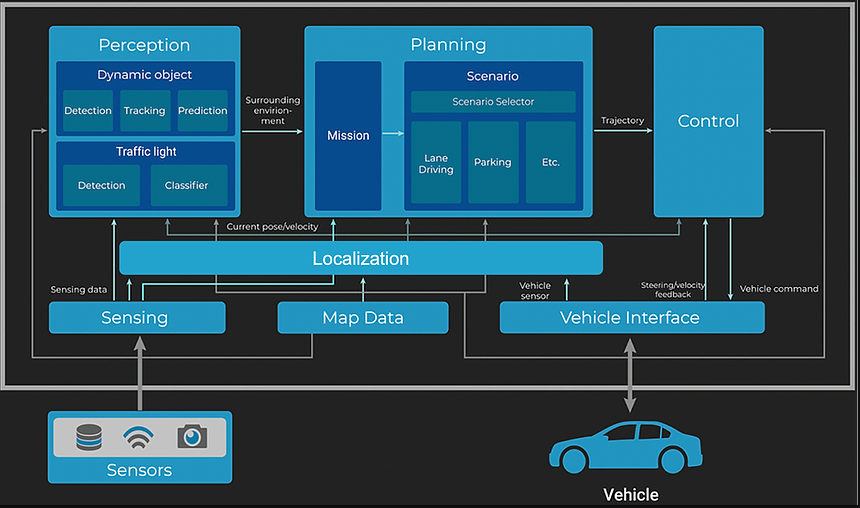
Autoware与Apollo类似,是2015年发布的开源自动驾驶项目,它基于机器人操作系统 ( ROS 2 ) ,包含Map Server、Sensor Drivers、Perception、Prediction、Localization、Planning、Control、Vehicle Interface、User Interface等完备的自动驾驶模块,对自动驾驶汽车在各种平台和应用程序上的商业部署起到了积极的推动作用。
open_planner编译报proj_api.h: No such file or directory