由于博客里有很多摸索和尝试的文章,顺序可能会颠倒,为了方便大家系统性的学习,本文对自动驾驶车辆的系统性学习和实践应该按顺序看哪些文章进行了下整理。
一、传感器与底盘
1. 基础
2. 传感器与底盘
2.1 Lidar
- 镭神C16(16线,200米)
- 速腾聚创RoboSense16(16线,150米)
- 禾赛Pandar40P(40线,150米)
2.2 IMU
- Yesense H30(9轴,200HZ)
2.3 GNSS
2.4 Camera
- 暂不参与建图,任意1080P分辨率相机即可
2.5 Radar
- 赛恩领动SINPRO-SFR-2K(水平FOV 120度,300米)
2.5 底盘
- 任意底盘均可
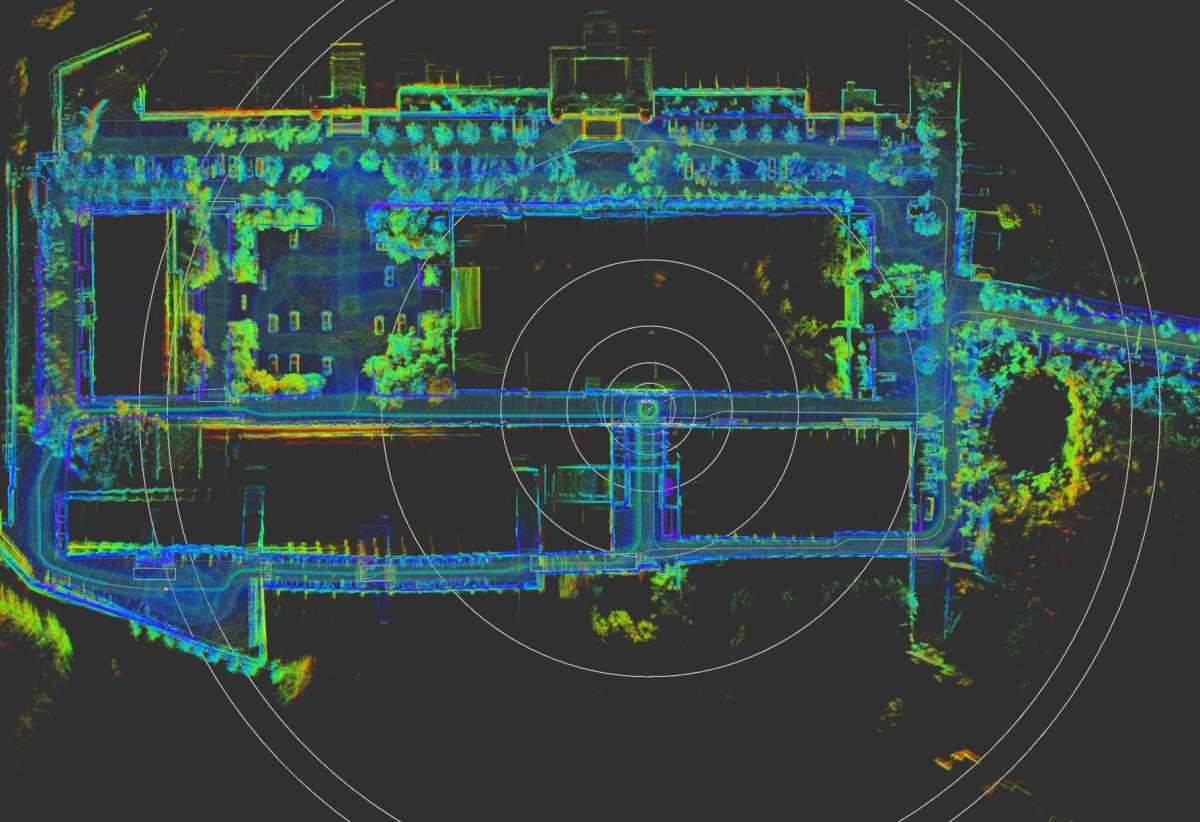
二、地图制作
1. 点云地图SLAM建图
2. 点云地图切割
3. 矢量地图制作
4. 计算GNSS与地图的旋转矩阵
三、自动驾驶(仿真)
1. autoware.ai:
1.1 环境准备
1.2 播包验证
# open docker
cd ~/autoware.ai/
./open-docker.sh
# run in docker
source ~/Autoware/install/setup.bash
roslaunch autolaunch run.launch use_gnss:=1 rviz:=true map_name:=xiangyansi control:=true bag_file:=/home/autoware/shared_dir/bag/xiangyansi/2025-09-01-19-11-11.bag bag_start:=02. autoware.universe:
四、自动驾驶(实车)
1. autoware.ai:
1.1 实车验证
启动底盘+传感器:
# start robot
cd ~/autoware.ai/Robot
./run.sh
# record
./hz.sh
./record.sh使用命令方式快速启动定位、感知、PNC:
# open docker
cd ~/autoware.ai/
./open-docker.sh
# build autolaunch
cd ~/Autoware
./build.sh autolaunch
source ~/Autoware/install/setup.bash
# launch localization/detection/planner
./run.sh
or
roslaunch autolaunch run.launch use_gnss:=1 map_name:=xiangyansi control:=true
# launch control
cd ~/autoware.ai/
./exec-docker.sh
./run.sh control打开rviz可视化界面:
# rviz
cd ~/autoware.ai/Robot
./rviz.sh指定目的地,即可自动规划路径并控制车辆。
2. autoware.universe:
待更新
yan 12.7