
上一次,我们使用ndt-mapping构建了一个PCD点云地图,在开始Autoware的导航之前,单靠点云地图是不够的,我们需要先绘制矢量地图,来约束可行驶的区域、方向等,然后再继续导航环节的验证。
上一次,我们使用ndt-mapping构建了一个PCD点云地图,在开始Autoware的导航之前,单靠点云地图是不够的,我们需要先绘制矢量地图,来约束可行驶的区域、方向等,然后再继续导航环节的验证。
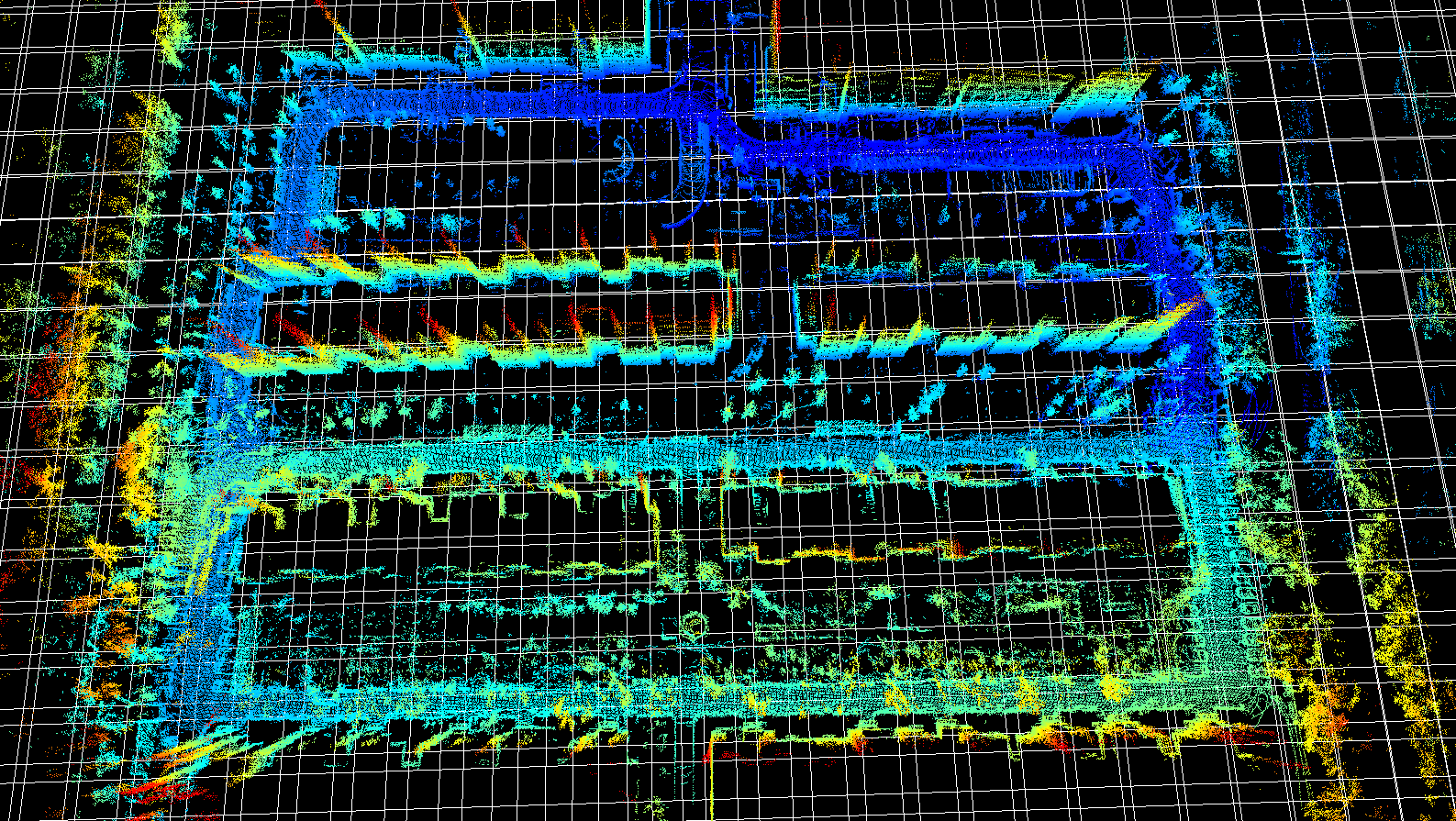
LIO-SAM对输入的点云/imu数据太敏感,道路距离过窄过宽都容易建图失败,在没有建筑物的公园基本用不了。因此本文尝试使用对特征点要求相对较少的ndt算法,来看看在小区或公园等场景的建图效果。
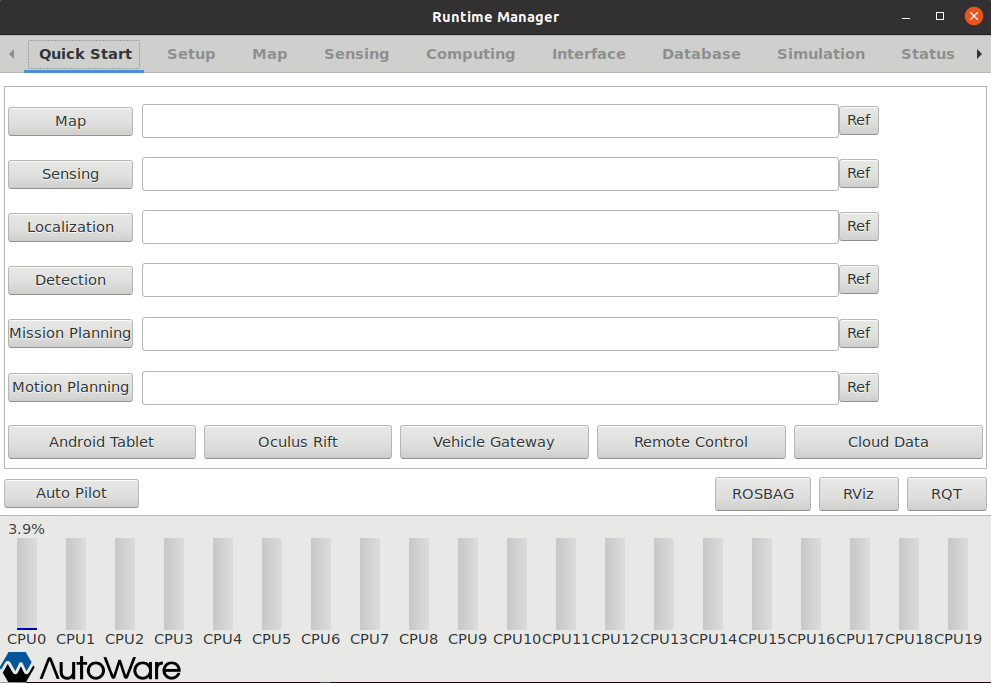
由于LIO-SAM在公园等树木多特征少的场景效果不太好,但NDT是集成在Autoware.ai 1.x版本里的,这里记录下部署编译过程。

今天新到一个G70 RTK定位模块,它支持多种卫星导航系统,包括中国BDS北斗,美国GPS,俄罗斯GLONASS、欧洲Galileo,日本QZSS卫星定位系统。G70内置RTCM更正,通过本地基站或网络 RTK设置中的虚拟参考站(VRS),可以支持厘米级定位。

全球卫星导航系统 (Global Navigation Satellite Systems,GNSS ),指基于卫星信号来确定用户接收机位置的系统。目前的全球卫星导航系统中,美国的 GPS系统和俄罗斯的 GLONASS系统处于完全运行状态,可以提供全球定位服务,中国的北斗系统 也于 2020 年完成。卫星导航系统 GNSS市场的快速增长,卫星导航系统 GNSS芯片向多模化的方向发展,即单一芯片支持多种卫星导航系统 GNSS系统,比如 GPS + GLONASS,GPS + Galileo,GPS + 北斗等等。
一台设备上有个docker容器,很好用,但是没有Dockfile,并且镜像hub是私有的不允许pull,但我想在另一台设备上使用这个镜像,应该怎么做呢?本文就介绍下操作方法。

今天开始尝试使用Lidar+IMU进行3D SLAM建图,本文记录下实验过程。

在使用LIO-SAM进行Lidar+IMU建图之前,需要做两个标定工作,IMU内参标定和Lidar-IMU外参标定。IMU内参标定,可以解决其固有的测量误差问题。Lidar和IMU的外参标定(以下简称“外参标定”),目的是获得激光雷达和IMU之间的位置转换关系,其中包括平移关系和旋转关系,对应最终输出结果中的平移向量与旋转矩阵。