
遇到采集的地图范围较大时,生成的点云地图也会比较大,例如我采集建图并进行0.1降采样的数据,PCD点云大约900M,这么大的点云points_map_loader是无法一次性加载并pub到topic给rviz展示的,必须进行点云分割和动态分块加载。本文就带大家一起尝试下解决方法。
遇到采集的地图范围较大时,生成的点云地图也会比较大,例如我采集建图并进行0.1降采样的数据,PCD点云大约900M,这么大的点云points_map_loader是无法一次性加载并pub到topic给rviz展示的,必须进行点云分割和动态分块加载。本文就带大家一起尝试下解决方法。
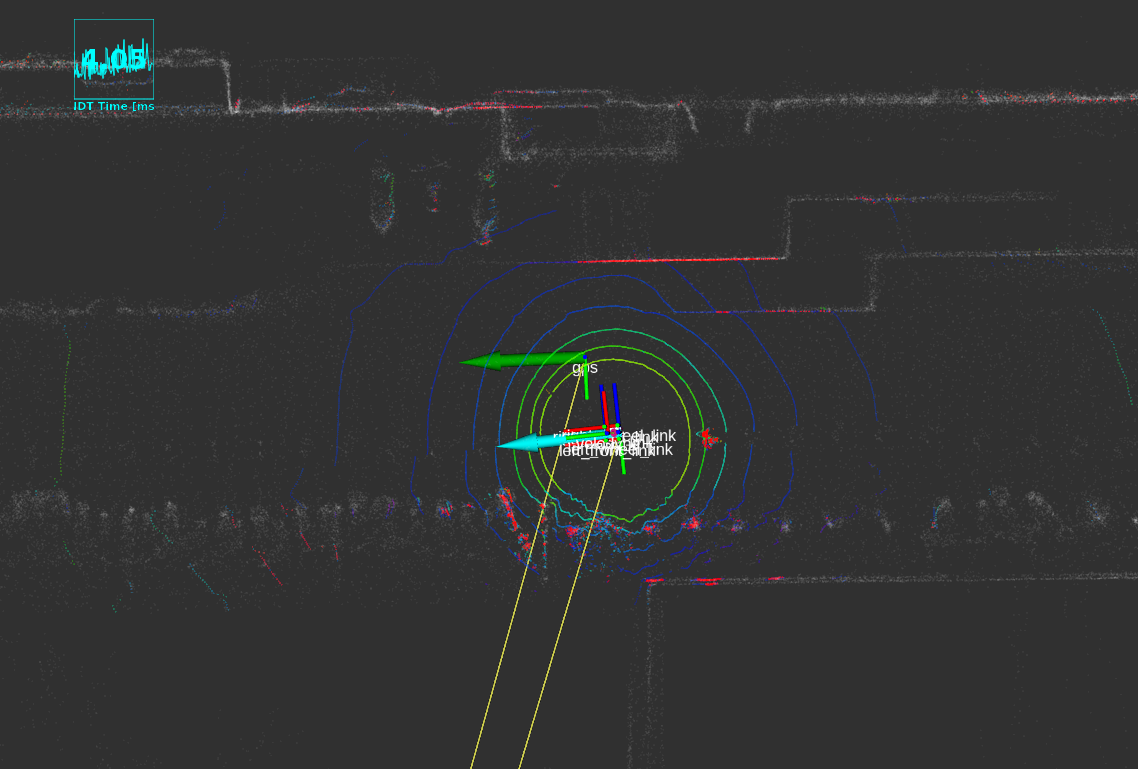
上一次,我们使用Autoware成功进行了ndt定位和导航,但是GNSS初始定位以及修正功能没有正常生效。行走途中遇到剧烈颠簸、非常狭小的空间、遮挡严重、或其他ndt局部定位特征不足时,ndt_matching会找不到自己位置导致定位飞。
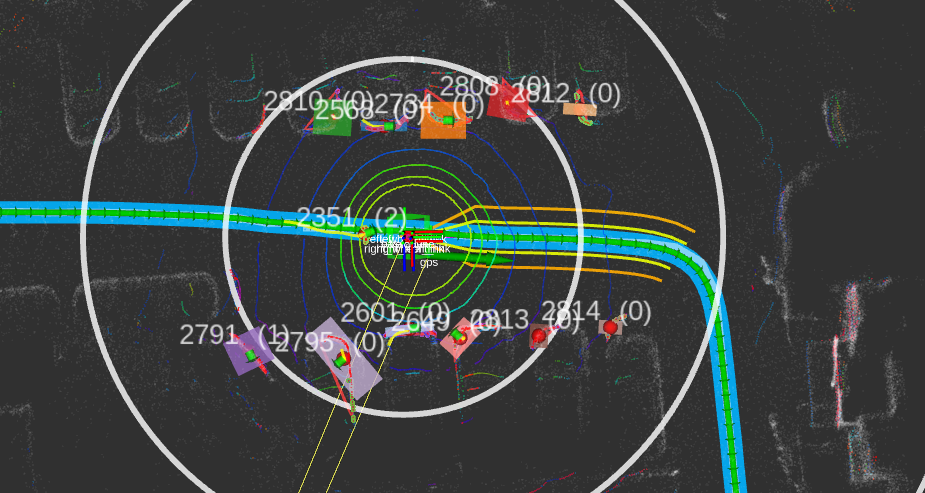
上一次,我们使用lio-sam、ndt-mapping分别尝试构建小区和公园的地图,今天我们继续下一步,地图来进行定位和导航的验证。