问题描述:
在 Ubuntu22.04 + Orin Arm 中构建 tensorrt_common 时,出现未找到 TENSORRT_NVPARSERS_LIBRARY 变量错误。
在 Ubuntu22.04 + Orin Arm 中构建 tensorrt_common 时,出现未找到 TENSORRT_NVPARSERS_LIBRARY 变量错误。
在Ubuntu 22.04上调试RS16的3D建图,发现ROS2无法正常显示点云,尝试使用官方的RSView工具也无法正常显示点云。
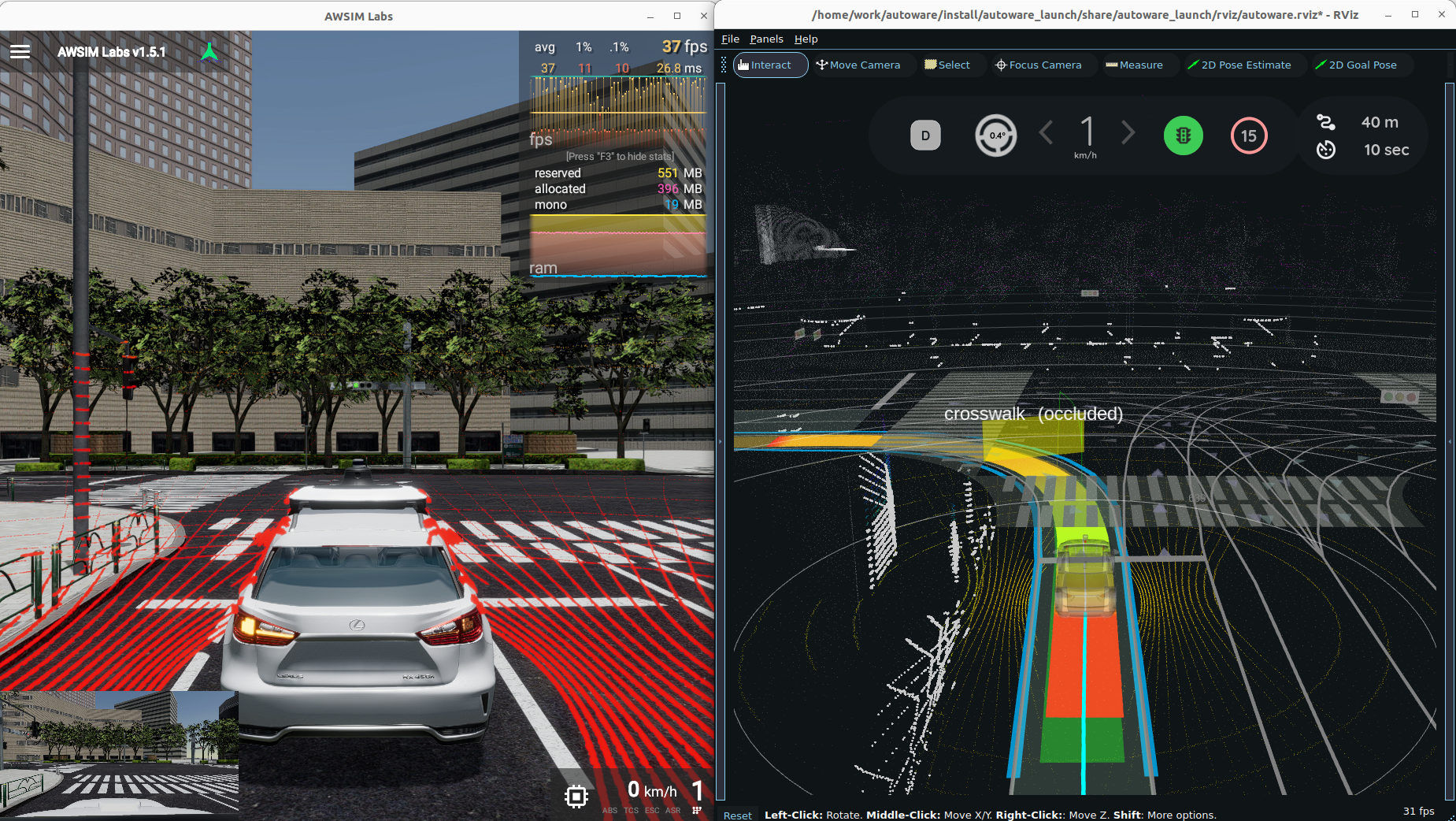
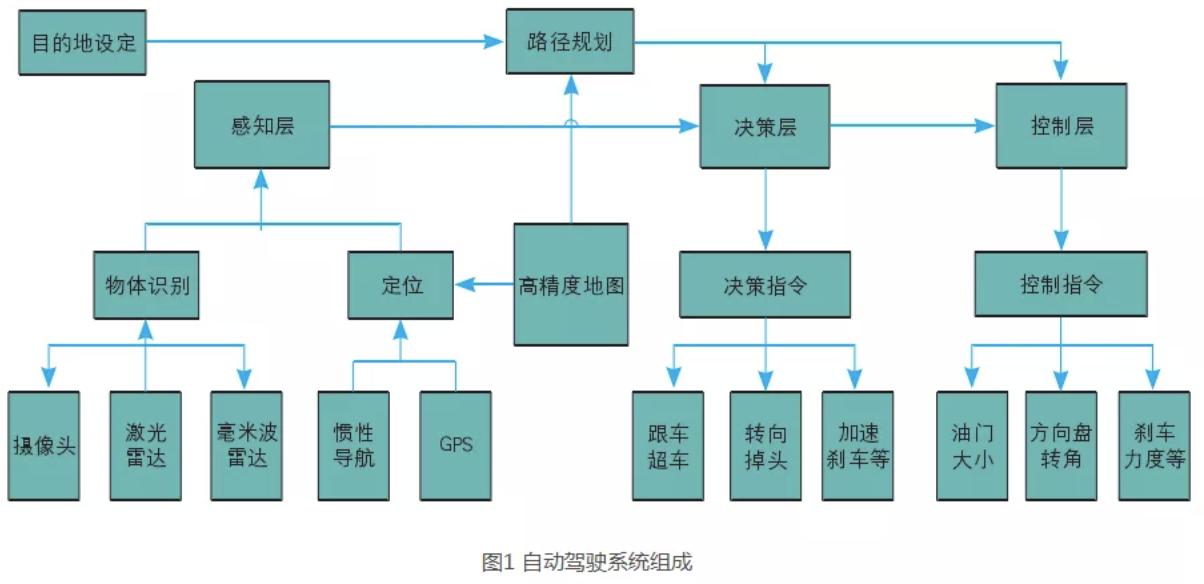
上次我们大概了解了Autoware是什么,以及它的基本原理。作为一个完备的自动驾驶框架,Autoware看起来很有吸引力,那么今天就带大家动手实践下,看它是不是像描述的那么好用。
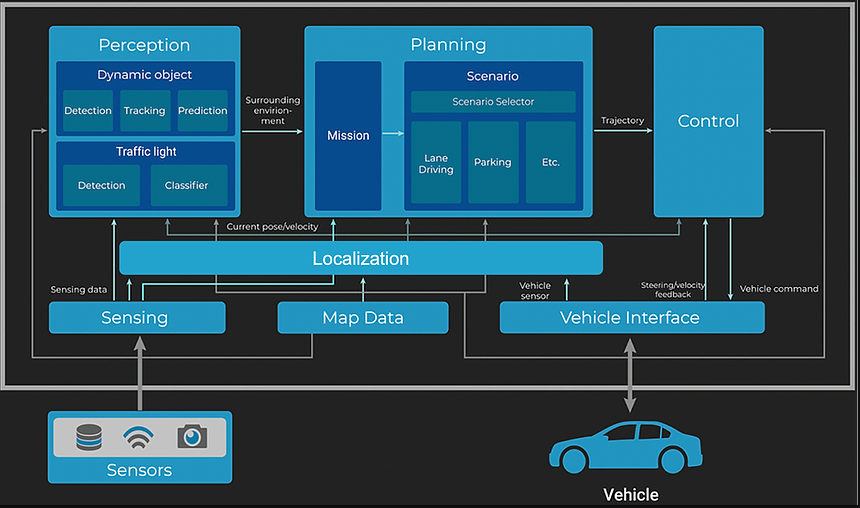
Autoware与Apollo类似,是2015年发布的开源自动驾驶项目,它基于机器人操作系统 ( ROS 2 ) ,包含Map Server、Sensor Drivers、Perception、Prediction、Localization、Planning、Control、Vehicle Interface、User Interface等完备的自动驾驶模块,对自动驾驶汽车在各种平台和应用程序上的商业部署起到了积极的推动作用。

2、机械底盘、线控底盘、滑板底盘与AGV、IGV、AMR
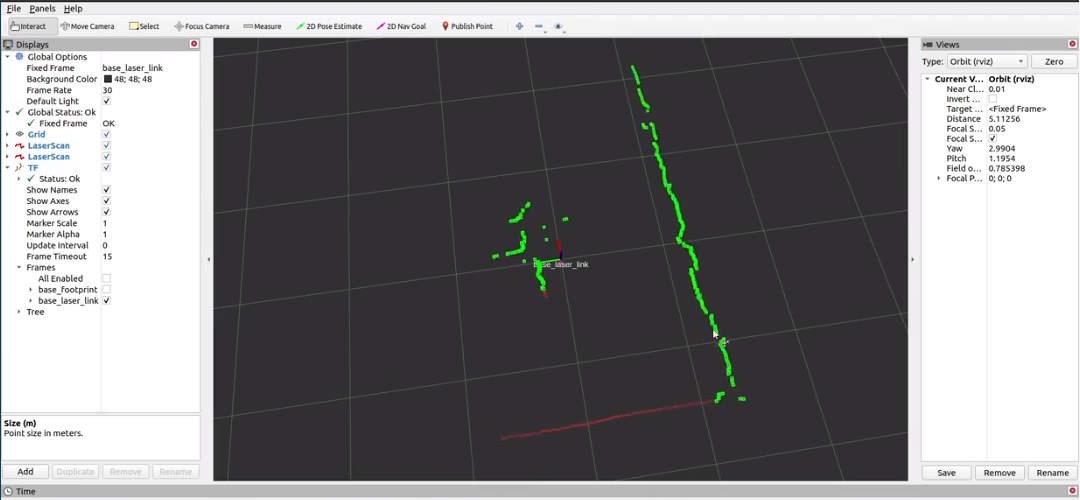
激光雷达通常可以检测360度等范围内的物体,但由于机械结构设计等原因,机器人本体可能会遮挡部分激光雷达扫描数据。如果将激光雷达原始点云直接用于建图或导航,则机器人本体的一部分会被当作障碍物导致建图或导航无法正常工作。

我们在使用SLAM建图后,为了提高显示及运行效果,通常需要对地图进行一些调整,比如点云毛刺清理、增加未知区域的边界防护等。本文主要讲解下如何对2D .gpm地图文件进行编辑修改的方法。
本文主要针对常见的2D建图算法Gmapping、Hector、Karto、Cartographer进行对比,以确定在室内小场景、室外大场景下使用哪种建图算法更为合适。
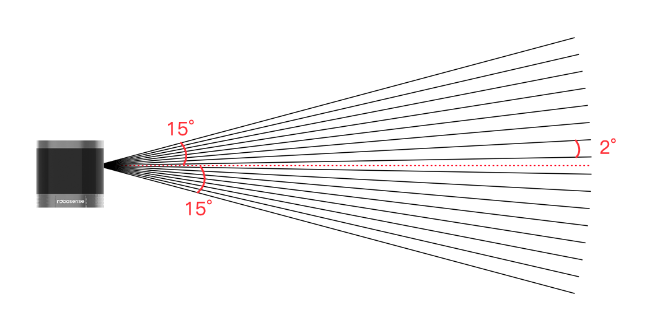
RS-LiDAR-16是速腾聚创推出的16线激光雷达,是一颗非常小型的激光雷达,主要面向无人驾驶汽车环境感知、机器人环境感知、无人机测绘等领域。RS16采用混合固态激光雷达方式,集合了16 个激光收发组件,最大探测距离150米,测量精度+/- 2cm以内。通过激光扫描反射提供三维空间点云数据及物体反射率,为定位、导航、避障等提供有力的保障。
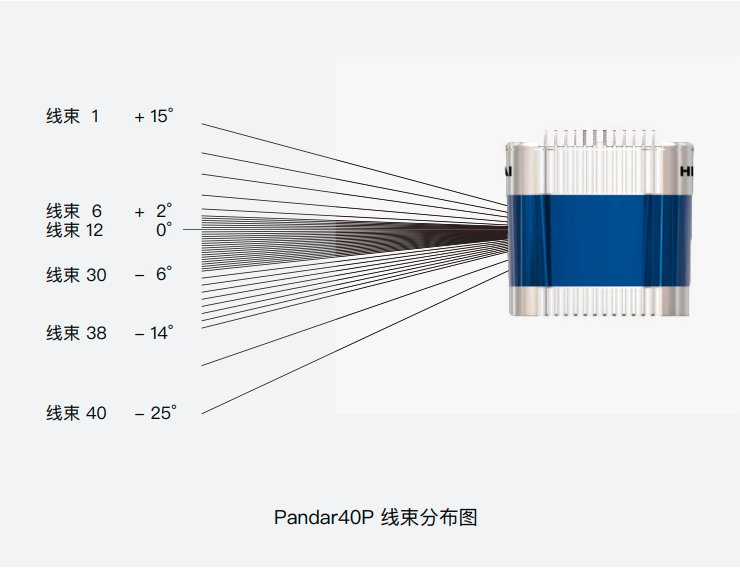
Pandar40P是一款机械旋转式40线激光雷达,其内部包含40个激光器,通过360°旋转实现3D成像。Pandar40P独特的角度分布,使其更加适用于自动驾驶。
open_planner编译报proj_api.h: No such file or directory
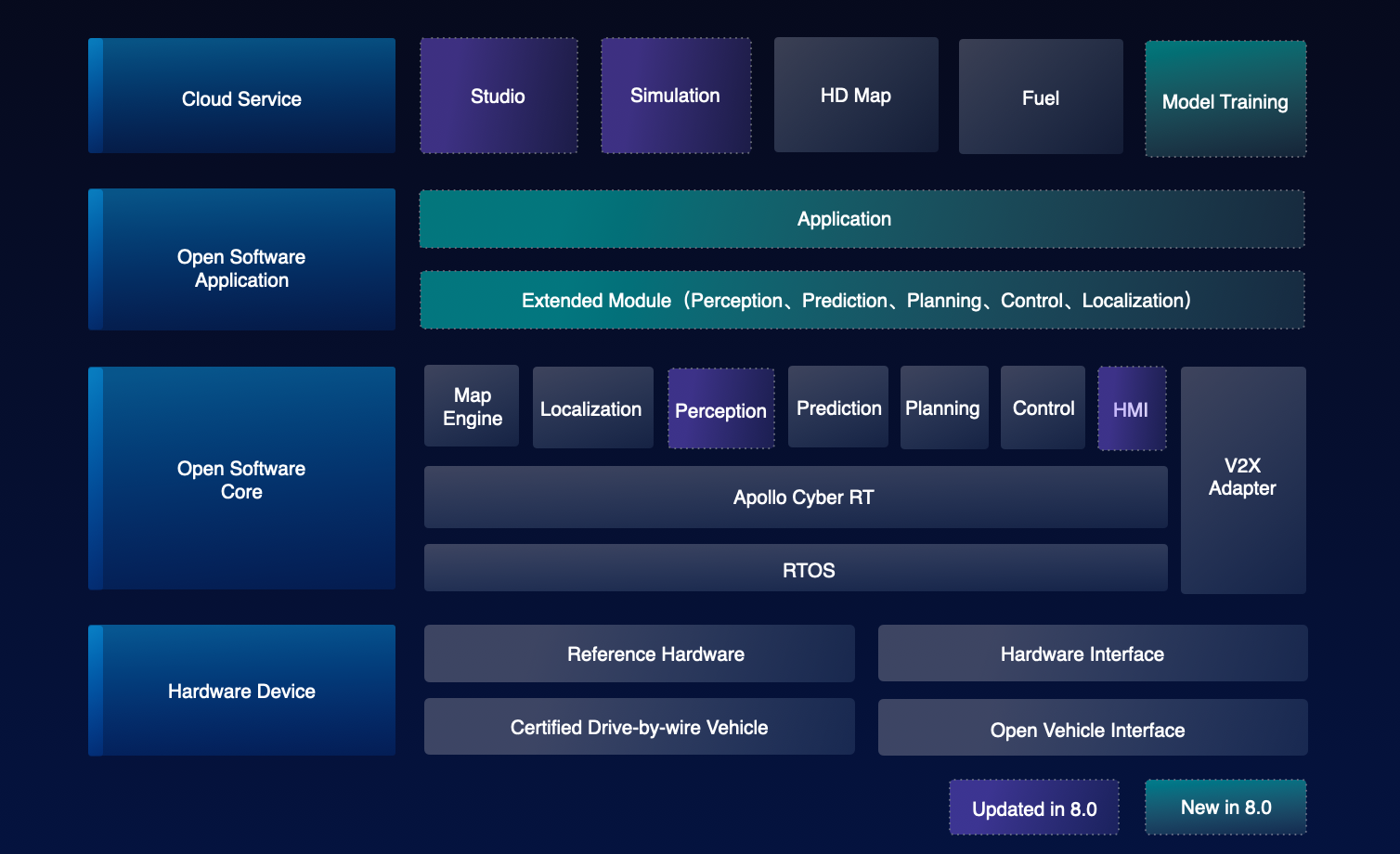
Apollo平台架构:
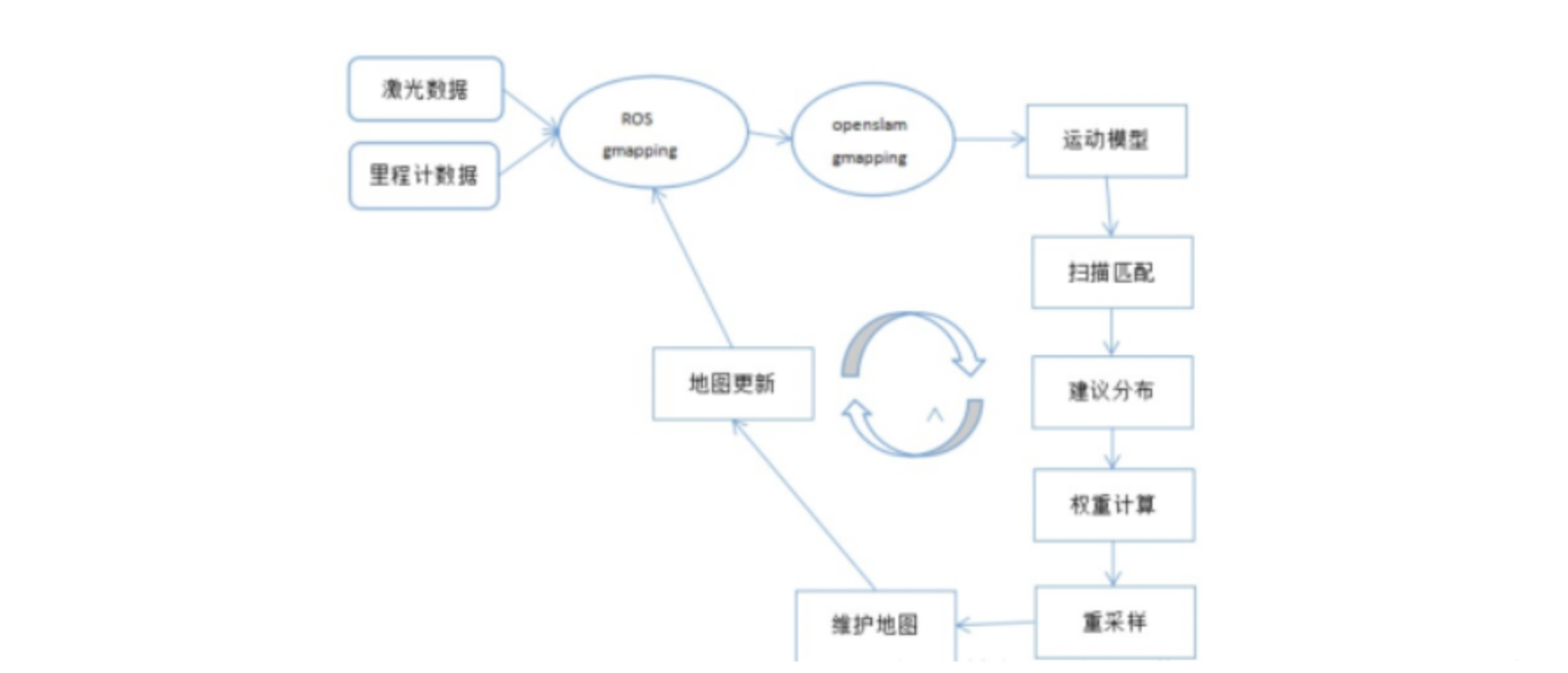
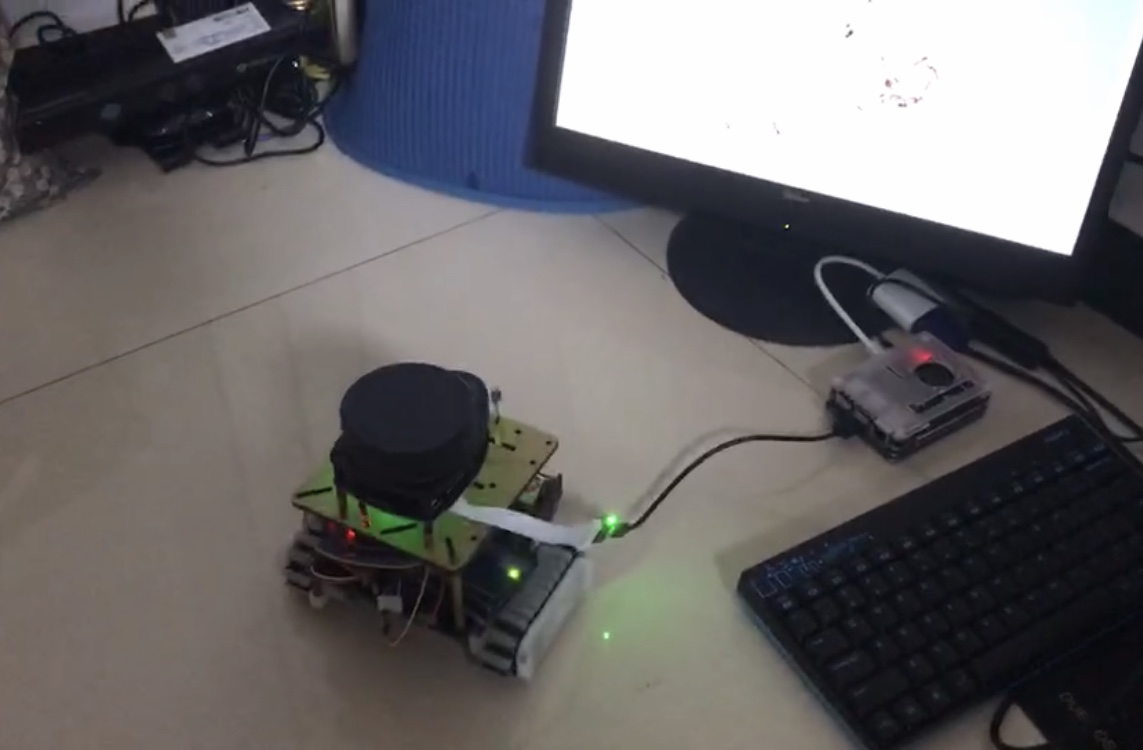
主流的激光SLAM算法有hector、gmapping、karto、cartographer。很多同学使用ROS默认自带的gmapping、hector等比较多,这次带大家一起尝试下传说中的google cartographer,看看效果差别有多大。
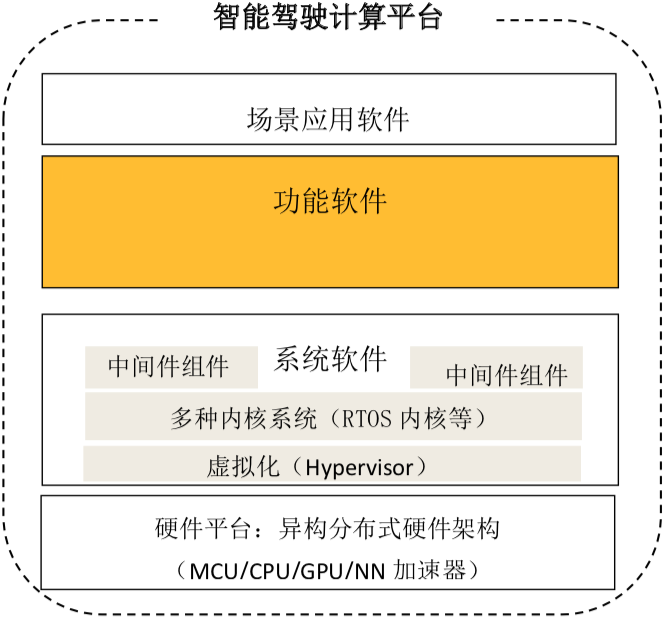
近期国家智能网联汽车研究中心及十几家产业链公司联合起草并发布业界首个智能驾驶功能软件平台设计规范,已经详细到接口/信号数据结构定义粒度,将会加速推动自动驾驶汽车软件的规范化。
移动机器人在环境中获取障碍物的具体位置、房间的内部轮廓等信息都是非常必要的,这些信息是机器人创建地图、进行导航的基础数据。考虑成本,买了一个SLAMTEC公司的低成本二维激光雷达RpLidar A1进行初步的学习,它可以最快10hz的频率检测360度范围内的障碍物信息,最远检测距离12米,适合室内移动机器人使用。本文讲解如何使用它感知周围环境。

全国SLAM技术论坛由中国图象图形学学会CSIG主办,每年举办一届,邀请学术界和企业届的专家围绕SLAM技术的研究、发展以及产业化应用作技术分享。本文整理自浙江大学刘勇教授在第二届全国SLAM技术论坛中的报告。
随着自动驾驶技术的发展,在未知环境中智能汽车的定位技术成为该领域研究的核心。目前定位技术主要的解决方案是基于全球定位系统(GPS),但是在某些特殊的环境中如下车库,没有 GPS 信号如何解决定位问题就是本文研究的关键所在。
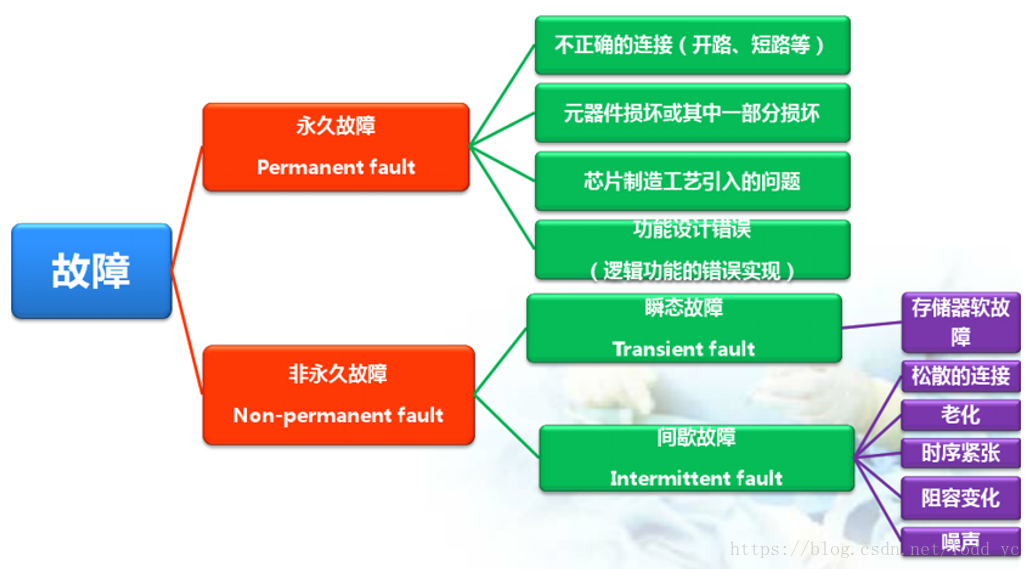
汽车功能安全中的有些概念比较绕,比如故障(fault),错误(error),失效(failure),今天就这三个概念进行下探讨。