有一个故事一直想分享给大家:
不是所有人都适合职场
发表评论
有一个故事一直想分享给大家:

这两天听了王校长的商业模式创新课程,感觉非常接地气,易于实操,很有感触,把启发的点记录下来。
上一次我们对DDS有了基础的了解,这一次我们对FastDDS关键特性和典型场景的实现机制进行进一步的了解。

DDS最早应用在美国海军系统,目前已广泛应用于军工、机器人、自动驾驶等领域,国际主流军工厂商、ROS2操作系统等均将DDS作为其控制系统的核心中间件,为各类战舰、机器人等提供可靠、高实时的分布式通信功能。今天就带大家一起了解一下。
本文是由一个朋友公司与绩效和协作管理相关的问题所引发,在这里总结一下为什么要做绩效管理,以及如何让绩效考核产生正向激励作用,而不是适得其反。
C++11中引入了mutex和方便优雅的lock_guard,但是有时候我们想要一个性能更高的实现方式,本文主要讲解如何使用C++11中的原子操作类atomic来巧妙地实现无锁同步。
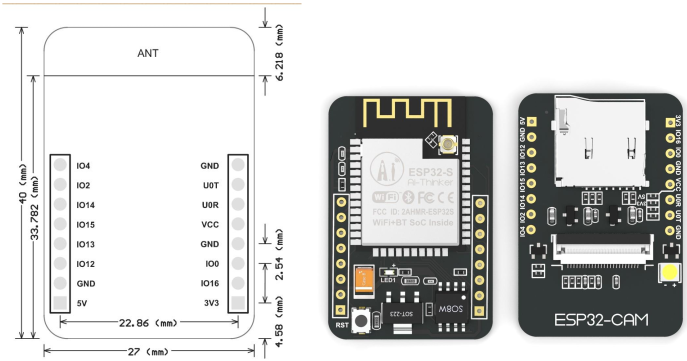
打算做个远程图传+底盘控制的物联网设备,uno的板子没有联网功能,esp8266、esp32成为两个比较好的选择,因为esp32是8266的升级版,我们这里就直接采用esp32-cam板进行测试。
C++多线程编程需要对共享的数据进行写保护,以防止多线程在对共享数据成员进行并发写时造成资源争抢而导致出现崩溃或其他不符合预期的结果。通常的做法是在修改共享数据成员前先对互斥锁mutex进行lock加锁,在修改后再进行unlock操作,这个场景中经常会出现由于疏忽或异常导致lock之后未能unlock,最终导致死锁。

最近调研4G图传控制模组,发现一个不错的wifi图传模块,用起来很简单,但是只能基于模组自身的wifi信号传输而不能走4G。虽然没能满足4G的需求,但是依然可以在很多场景发挥作用,比如近场遥控汽艇、潜艇、无人机、坦克的视频监控,Wifi 2.4G的信号也还是可以传很远距离的,既然还有这么多应用场景,这里就记录下模组的设计和使用方法吧,方便做小玩意时用。
static_pointer_cast从表面上看就是静态指针类型转换。细细看来,并不是那么简单,有一个隐形的限制条件。首先这个是c++11里的,更老的编译器不支持,其次指针是shared_ptr类型的,对于普通指针是无效的。还有一般只用在子类父类的继承关系中,当子类中要获取父类中的一些属性时,或工厂模式等需要通过父类参数接收不同子类实例的场景(当然了子类通过多态拥有自己的父类继承来的属性和行为,但是还想知道父类相应的属性和行为,这时,将父类的shared_ptr通过static_pointer_cast转化为子类的shared_ptr,这样就可以使得子类可以访问到父类的方法)。
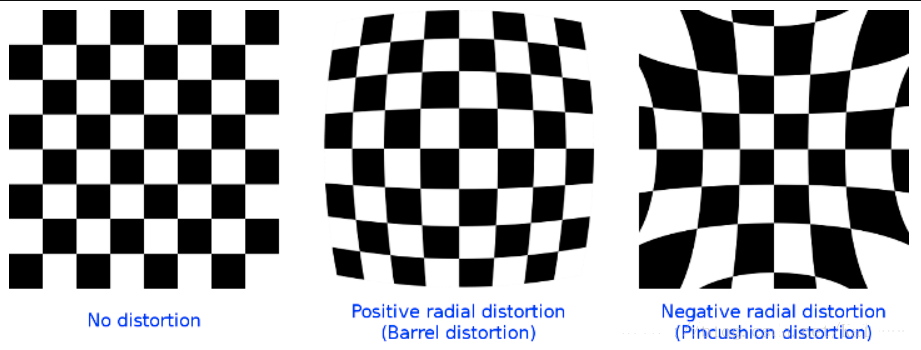
最近使用摄像头做三维重建和激光雷达联合建图,发现摄像头所还原的三维点云与激光雷达的点云在不少位置存在明显偏差。使用两个点云构建的地图进行导航对比,还是激光雷达的更加精准,此时很有可能是摄像头的标定不精准导致的,本文就主要讲下如何对摄像头进行标定。
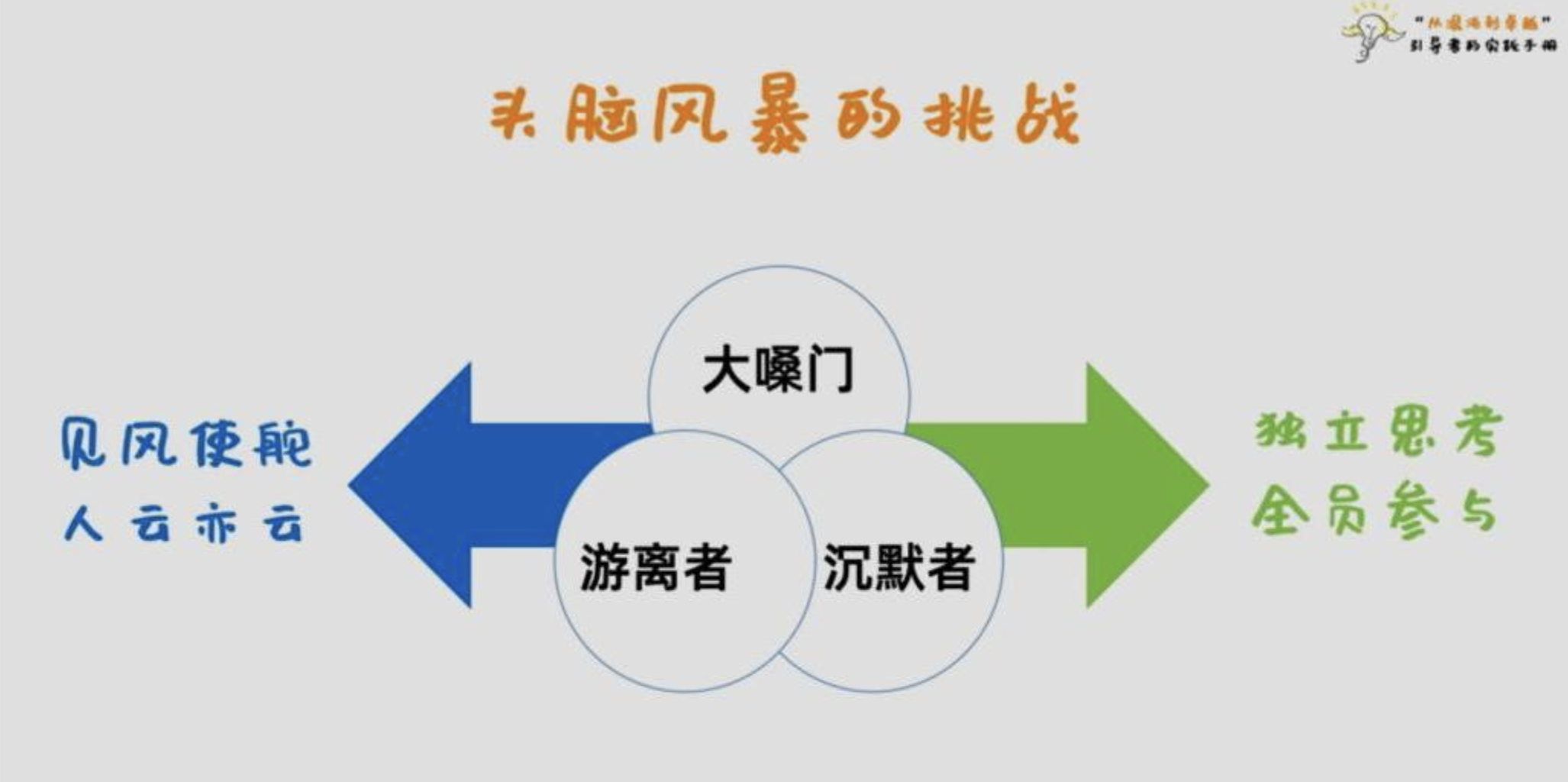
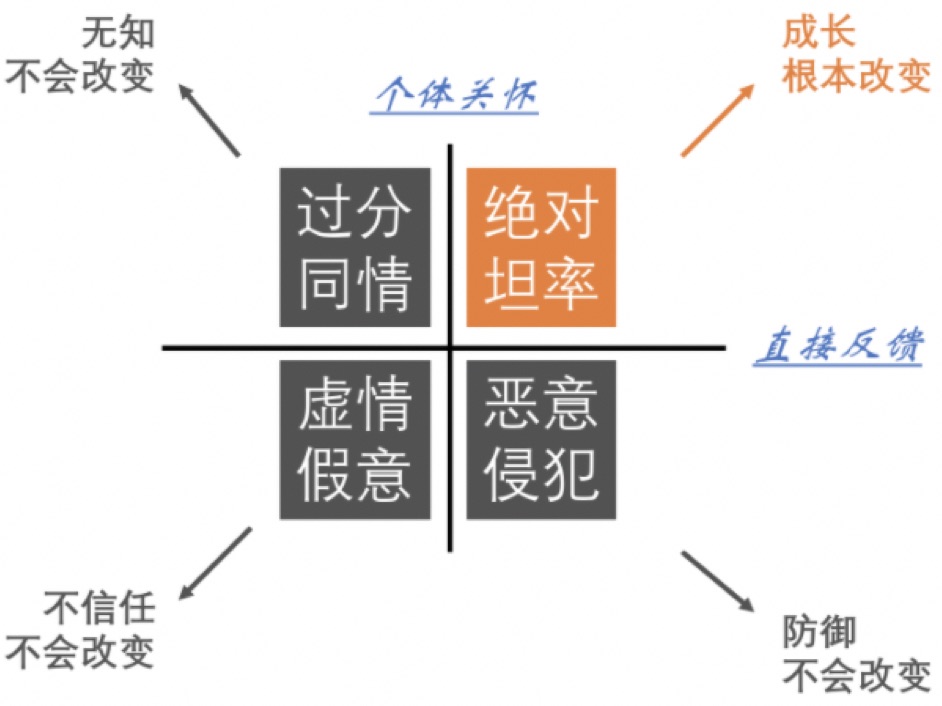
在激发团队活力、挥发团队智慧的过程中,当人数较多时,直接全员集体讨论很容易因大量沉默者、少量大嗓门、部分游离者导致效果不佳,这时作为组织者,通常需要使用一些管理工具,这些工具相互关联、常组合使用,今天在这里统一进行汇总整理。
主流的激光SLAM算法有hector、gmapping、karto、cartographer。很多同学使用ROS默认自带的gmapping、hector等比较多,这次带大家一起尝试下传说中的google cartographer,看看效果差别有多大。
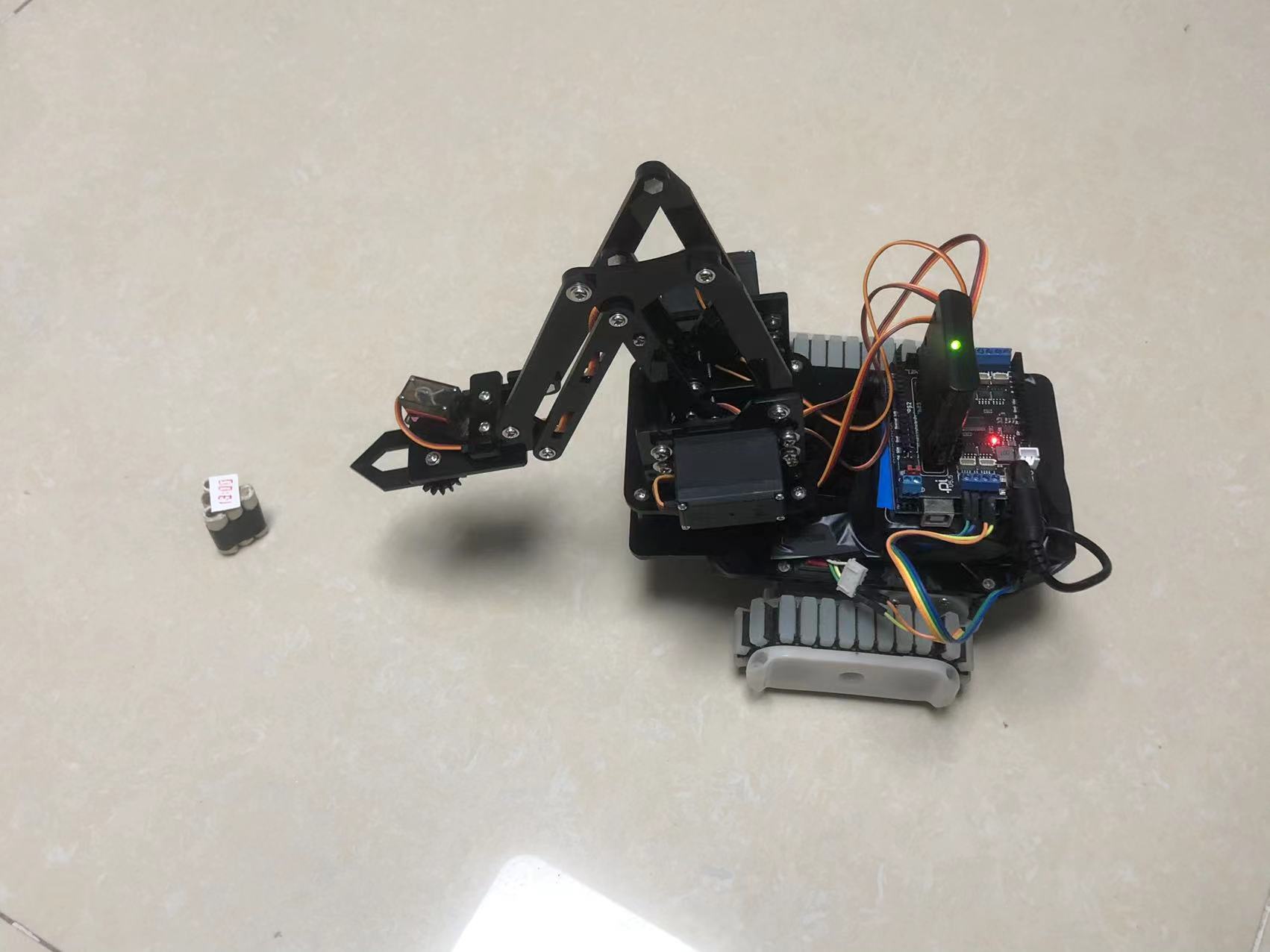
五一疫情防控不能外出,呆在家里实在无聊,决定跟儿子一起做个排爆机器人,需要同时控制4个舵机、2个底盘电机、1个无线手柄的控制和接收,但L298P只有1个伺候,再外挂个16路舵机板的话有点太乱了。偶然间看到一块功能比较全面的驱动板,可以同时驱动电机、舵机、蓝牙、超声波等,我们就使用这块板子尝试做个排爆机器人。
让孩子学会自学,才能发挥出他的最大潜能。
在一块新的pi4板子上装了ubuntu20.04,结果连wifi一直弹出”Authentication required. System policy prevents WiFi scans”的认证提示,没完没了的弹,点了之后也无法输入密码。
这本书主要关于查理.芒格的汇编,收集了他的学习方法、决策过程、投资策略,以及他的演讲和名言。
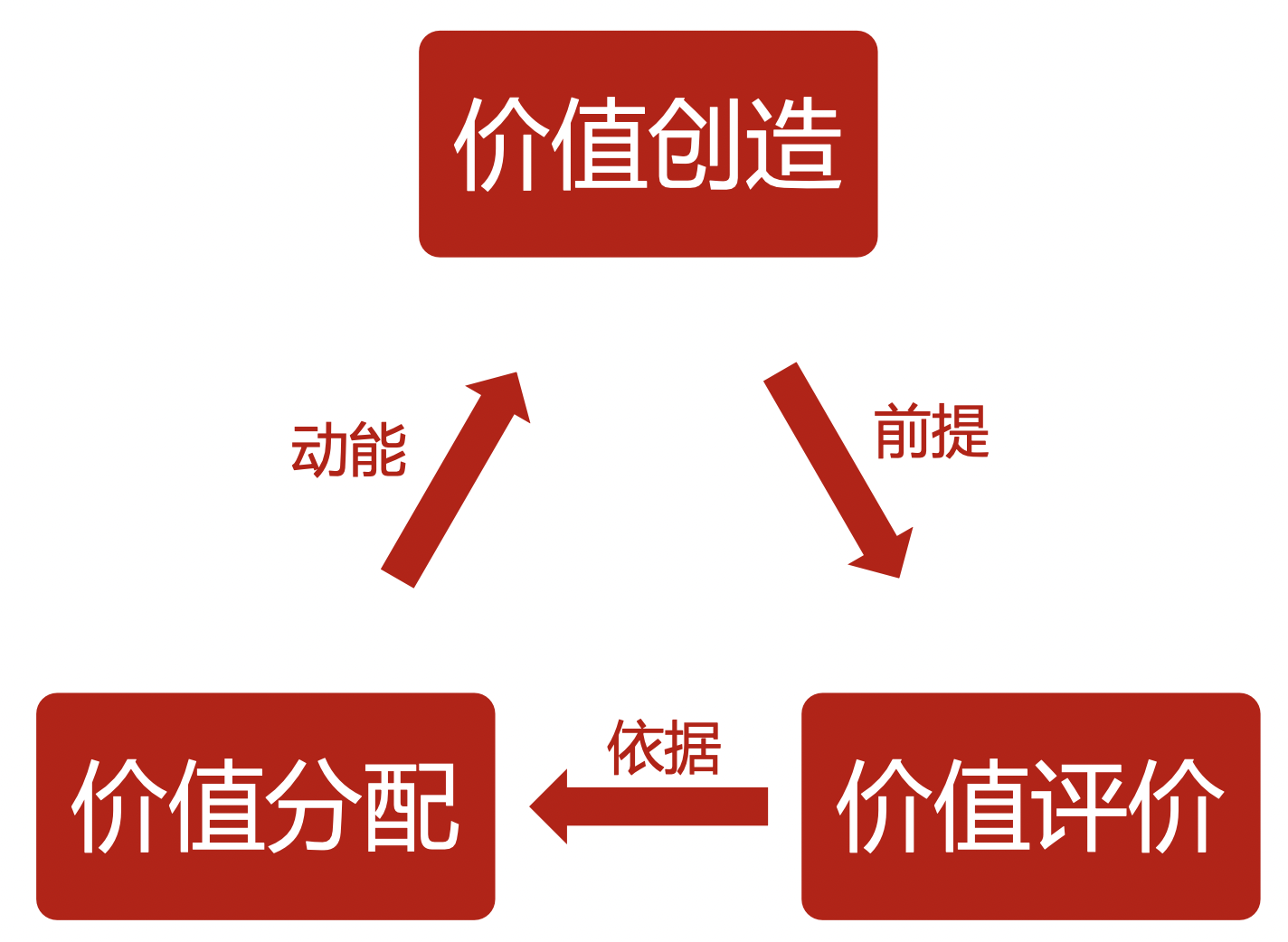
这个课程主要指出绩效评价和绩效沟通中需要注意的关键点,绩效是日常管理的检验,不只是对员工产出的考核,也是对管理者领导力的考核。其中比较有感触的点:

这个课程主要是为了提醒管理者,作为生产经营的参与方,应具备经营者意识、全局最优资源分配意识,应破除领地意识,树立阵地意识,使公司资产得到更高效的配置,从而产生更大的价值。
最近这两年感觉自己总是忙的晕头转向,工作、生活、健康、学习难以平衡,最后感觉哪方面都没做好,直到我看了一本书《精要主义》,读后根据书中的方法进行实践,发现生活确实美好了很多,虽然因此失去了一些东西,但也因此得到了一些更宝贵的东西。