本文以6轴IMU、Liar、GPS传感器为基础,记录LIO-SAM建图的过程,以及需要注意的事项。
一、概述
LIO-SAM(Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping)是一个利用GT-SAM通过平滑和映射实现紧耦合的激光雷达惯性里程计,实现了高精度、实时的移动机器人的轨迹估计和建图。

架构设计:
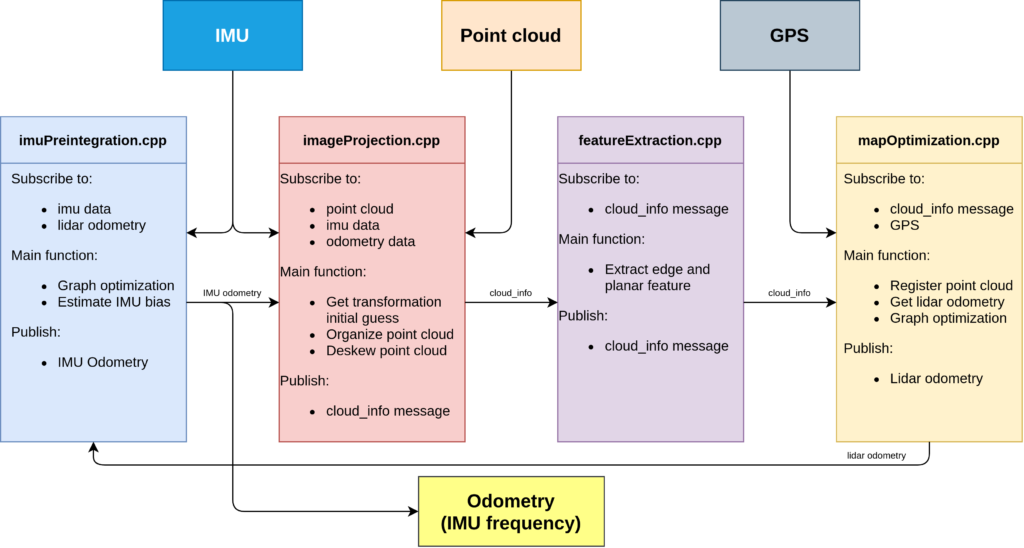
工作原理:接收3D激光雷达、IMU以及GPS作为输入,引入四种因子去构建因子图。
- IMU预积分因子
- 激光里程计因子
- GPS因子
- 闭环因子

论文研读:LIO-SAM—通过平滑和映射实现紧耦合激光雷达惯性里程计
二、LIO-SAM
软件环境:
1. 编译LIO-SAM
# source
mkdir -p ~/catkin_ws/src
cd ~/project
git clone https://github.com/JokerJohn/LIO_SAM_6AXIS.git # 6轴IMU版本
# modify
cd ~/project/LIO_SAM_6AXIS
# 删除不存在的Geoid.hpp
vim LIO-SAM-6AXIS/src/simpleGpsOdom.cpp
// #include <GeographicLib/Geoid.hpp>
vim LIO-SAM-6AXIS/src/mapOptmizationGps.cpp
// #include <GeographicLib/Geoid.hpp>
# include
mkdir LIO-SAM-6AXIS/include/GeographicLib
cp LIO-SAM-6AXIS/ThirdParty/GeographicLib/include/* LIO-SAM-6AXIS/include/GeographicLib/
# 清理
rm LIO-SAM-6AXIS/src/mapOptmization.cpp
# cp to catkin_ws
cp -R LIO-SAM-6AXIS/ rviz_satellite/ ~/catkin_ws/src
# build
cd ~/catkin_ws/
catkin_make
source ~/catkin_ws/devel/setup.bash
2. 卫星地图加载测试
# 修改测试配置
vim src/rviz_satellite/launch/demo.gps # 测试用坐标(默认美国费城)
latitude: 22.3387116703647
longitude: 114.263642735396
altitude: 107.128592180088
vim src/rviz_satellite/launch/demo.rviz # 卫星图像服务切换为MapBox、topic修改为/gps/fix
Object URI: https://api.mapbox.com/styles/v1/mapbox/satellite-v9/tiles/256/{z}/{x}/{y}?access_token=pk.eyJ1IjoieGh1YmQiLCJhIjoiY2w4YWo4OXJ6MGJuMzN3bHl4YXh3OW12YyJ9.Y_5wSWax9RSJ8zgGIWQPxA
Topic: /gps/fix
# 启动测试(根据GPS位置加载卫星地图的rviz插件)
roslaunch rviz_satellite demo.launch
3. 播包建图测试
首先下载香港科技大学地图bag包(密码:m8g4),包内数据使用的传感器为VLP-16,STIM300 IMU,摄像头,普通GPS。我们把包房
# 配置bag包目录
vim LIO-SAM-6AXIS/launch/test_vlp16.launch
<!-- <arg name="bag_path" default=""/> -->
<arg name="bag_path" default="/home/work/data/bag/hkust/hkust_20201105full.bag"/>
<arg name="sequence" default="hkust_campus"/> # 地图保存目录
# 启动slam
roslaunch lio_sam_6axis test_vlp16.launch
# 保存地图
rosservice call /lio_sam_6axis/save_map
# 查看地图
pcl_viewer ~/catkin_ws/src/LIO-SAM-6AXIS/data/hkust_campus/globalmap_lidar_feature.pcdhkust_campus/
生成的点云地图:

# 查看订阅关系
rosrun rqt_graph rqt_graph
# 查看TF
rosrun rqt_tf_tree rqt_tf_tree订阅关系:

TF:

三、实时建图
1. 硬件设备
本文使用以下传感器,可根据对应说明进行传感器安装、配置和调试:
- Lidar:镭神C16(16线,200米)
- IMU:Yesense H30(9轴,200HZ)
- GNSS:G70 + 千寻RTK差分
- Camera:暂不参与建图,用于回放确认场景
- 底盘:任意底盘均可
传感器安装调试后,需要确保满足以下几点要求:
- 数据:传感器正常输出到Topic,数据格式符合要求;
- 时间:传感器时钟经过同步,时间戳满足对齐条件;
- 外参:传感器相对后轴中心的安装位置进行过校准,并通过TF输出变换关系;
- 其他:低线数Lidar尽量具有360度视角;IMU尽量处于后轴中心点;IMU/Lidar的X轴朝前;
关于传感器几个特殊/说明:
1.1 Lidar的扫描距离/水平和垂直角度
调整ls16 lidar扫描距离为200米:
# 点云最近和最远距离:
vim robot/lslidar_ros/lslidar_cx_driver/launch/lslidar_c16.launch
<!--param name="min_range" value="0.15"/>
<param name="max_range" value="150.0"/-->
<param name="min_range" value="0.01"/>
<param name="max_range" value="200.0"/>
# 修改后启动lidar和rviz,确保激光雷达底座或者线束不会被扫到(会触发障碍物导致无法行走)
roslaunch lslidar_cx_driver lslidar_c16.launch
rviz
调整ls16 lidar的点云屏蔽水平角度:
# 点云屏蔽角度区间(值为度数*100;正前方为0/360度,正后方为180度,向右后方顺时针旋转度数逐渐增加):
vim robot/lslidar_ros/lslidar_cx_driver/launch/lslidar_c16.launch
<!-- <param name="angle_disable_min" value="12000"/>
<param name="angle_disable_max" value="24000"/> -->
<param name="angle_disable_min" value="0"/>
<param name="angle_disable_max" value="0"/>
# 0,0意思是不屏蔽,360度的点云都要。如果填写0,18000,表示屏蔽所有右半侧的点云,大家根据实际情况修改即可。
# 启动lidar和rviz,检查屏蔽角度是否生效:
roslaunch lslidar_cx_driver lslidar_c16.launch
rviz调整激光雷达点云扫描垂直角度:
# 点云扫描最低和最高角度:
vim robot/pointcloud_to_laserscan/launch/pointcloud_scan.launch
min_height: -0.1
max_height: 2.0调整激光雷达位置:
修改base_footprint到laser的tf:
- x:Lidar中心点到后轴中心点的前后距离差,单位为米。Lidar相较后轴更朝前安装为正值,往后为负值。我这里实际测量是0.26
- y:Lidar中心点到轴中心点的左右距离差,单位为米。Lidar相较后轴中心点往左安装为正值,往右安装为负值。因为我的Lidar左右是居中安装的,所以这里值为0
- z:Lidar中心点距离前/后轴中心点的高度差,单位为米。我这里加高前Lidar距地面高0.298,加高后距地面0.438。减去前/后轴中心点距离地面高度0.063,所以加高前z为0.235,加高后z为0.375。
vim robot/turn_on_wheeltec_robot/launch/robot_model_visualization_cx.launch
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.26 0.00 0.375 -1.57 0 0 base_footprint velodyne 100" />1.2 IMU的安装位置
IMU默认应安装在后轴中心点,如果不是,必须输出对应的外参偏移量:
- x:IMU中心点到后轴中心点的前后距离差,单位为米。IMU相较后轴更朝前安装为正值,往后为负值。我这里实际测量是0.105
- y:IMU中心点到轴中心点的左右距离差,单位为米。IMU相较后轴中心点往左安装为正值,往右安装为负值。因为我的IMU实际测试为0.052
- z:IMU中心点距离前/后轴中心点的高度差,单位为米。我这里IMU距地面高0.115,减去前/后轴中心点距离地面高度0.063,z为0.052。
vim robot/turn_on_wheeltec_robot/launch/robot_model_visualization_cx.launch
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0.105 0.052 0.052 0 0 0 base_footprint gyro_link 100" />2. LIO-SAM配置
2.1 初始化配置
由于C16雷达输出点云格式与Veloyne一致,因此不需要格式转换,可以复用vlp16的配置进行微调。
cd ~/catkin_ws/src/LIO-SAM-6AXIS cp config/params_vlp.yaml config/params_ls.yaml cp launch/test_vlp16.launch launch/test_ls.launch # launch配置vim launch/test_ls16.launch <launch> <arg name="project" default="lio_sam_6axis"/> <arg name="bag_path" default=""/> <arg name="lat" default=""/> <arg name="lng" default=""/> <arg name="alt" default=""/> <arg name="rviz" default="true"/> <!-- rosservice call /lio_sam_6axis/save_map save data path --> <arg name="sequence" default="xiangyansi"/> <!--set your own Parameters --> <rosparam file="$(find lio_sam_6axis)/config/params_ls16.yaml" command="load"/> <!--- LOAM --> <param name="saveDirectory" type="string" value="$(find lio_sam_6axis)/data/"/> <param name="configDirectory" type="string" value="$(find lio_sam_6axis)/config/"/> <rosparam param="sequence" subst_value="true">$(arg sequence)</rosparam> <include file="$(find lio_sam_6axis)/launch/include/module_loam.launch"/> <!--- Robot State TF --> <group unless="$(eval bag_path == '')"> <include file="$(find lio_sam_6axis)/launch/include/module_robot_state_publisher.launch"/> </group> <!--show satellite--> <!--set your orgin gps lla 22.3387279108228 114.263622199692 87.7310562180355 --> <group unless="$(eval lat == '' or lng == '' or alt == '')"> <node pkg="rostopic" type="rostopic" name="fake_gps_fix" args="pub gps/fix sensor_msgs/NavSatFix '{ header: auto, latitude: $(arg lat), longitude: $(arg lng), altitude: $(arg alt)}'" output="screen"/> </group> <!--- Run Navsat --> <node pkg="lio_sam_6axis" type="lio_sam_6axis_gpsOdometry" name="lio_sam_6axis_gpsOdometry" output="log"/> <!--- Run Rviz--> <group if="$(eval rviz == true)"> <node pkg="rviz" type="rviz" name="$(arg project)_rviz" args="-d $(find lio_sam_6axis)/launch/include/config/vlp.rviz"/> </group> <!--- Play Bag--> <group unless="$(eval bag_path == '')"> <node pkg="rosbag" type="play" name="bag_play" args="$(arg bag_path) --clock -d 5 -r 1.0"/> </group> </launch>
2.2 传感器Topics/Frames
vim config/params_ls16.yaml
# Topics
pointCloudTopic: "points_raw" # Point cloud data
imuTopic: "imu_raw" # IMU data
gpsTopic: "gps/fix" # GPS odometry topic from navsat, see module_navsat.launch file
odomTopic: "odometry/imu" # 由imageProjection激光里程计因子生成,实际pub topic时会后缀_incremental,非传感器驱动topic。IMU pre-preintegration odometry, same frequency as IMU
# Frames
lidarFrame: "base_link"
baselinkFrame: "base_link"
odometryFrame: "odom"
mapFrame: "map"2.3 GPS
启用GPS,注意使用gps海拔高度,打开GPS协方差噪声过滤和GPS距离过滤。
# GPS Settings
useGPS: true
# updateOrigin: true # 停用。when you can not get a reliable gps origin points(RTK fixed)
gpsFrequence: 10 # gps topic帧率(单位hz,10hz表示只使用激光雷达时间戳前后100ms的gps数据)set proper gps frequence to align gps and lidar timestamp
useImuHeadingInitialization: false # if using GPS data, set to "false"
useGpsElevation: true # 是否使用gps海拔高度(Fix=1质量好时,设置true可以解决分层问题) if GPS elevation is bad, set to "false"
gpsCovThreshold: 8.0 # GPS协方差噪声阈值。 m^2, threshold for using GPS data
# poseCovThreshold: 25.0 # 停用。m^2, threshold for using GPS data
gpsDistance: 5.0 # 当最新有效gps位置与上一帧有效gps位置之间的距离小于n米时,丢弃数据。设计本意是为了降低rtk-lidar位置纠偏频率(因为段距离imu还是比较准的) the distance between two gps point used for optimization 2.4 Debug
按需打开对应的debug开关,方便调试相关数据。
# debug setting
debugLidarTimestamp: false
debugImu: false
debugGps: true2.5 Lidar配置
lidar的扫描线数、角度、帧数等配置。由于c16点云格式与velodyne一致,我们这里直接使用vlp16的配置。
# Sensor Settings
sensor: velodyne # lidar sensor type, either 'velodyne' or 'ouster'
N_SCAN: 16 # number of lidar channel (i.e., 16, 32, 64, 128)
Horizon_SCAN: 2000 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048)
downsampleRate: 1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 0.15 # default: 1.0, minimum lidar range to be used
lidarMaxRange: 1000.0 # default: 1000.0, maximum lidar range to be used2.6 IMU内参
内参的获取方法详见:H30 IMU + Pandar40P Lidar联合标定
# IMU Settings
imuAccNoise: 1.3728471070253096e-02
imuGyrNoise: 8.0812003774619718e-04
imuAccBiasN: 3.2132560329046421e-04
imuGyrBiasN: 4.4240582574498520e-05
imuGravity: 9.80511
imuRPYWeight: 0.012.7 IMU-Lidar外参
为了使系统正常运行,需要在“params.yaml”文件中提供正确的外部转换,我们需要自己根据Lidar-IMU标定情况修改这里的标定外参。
- extrinsicTrans:Lidar坐标系的原点在imu坐标系下的坐标值。
- extrinsicRot:表示imu->lidar的坐标变换, 用于旋转imu坐标系下的加速度和角速度到lidar坐标系下
- extrinsicRPY:旋转imu坐标系下的欧拉角到lidar坐标下
外参的标定方法详见:H30 IMU + Pandar40P Lidar联合标定
我们这里由于lidar和imu之间并不存在旋转,只有前后和上下的平移,因此单独手标并配置extrinsicTrans即可:
# Extrinsics (lidar -> IMU)
imu_type: 0 # 0: 6axis, 1:9 axis
extrinsicTrans: [ 0.25, 0, 0.15 ]
extrinsicRot: [ 1, 0, 0,
0, 1, 0,
0, 0, 1 ]
extrinsicRPY: [ 1, 0, 0,
0, 1, 0,
0, 0, 1 ]2.8 点云下采样
如果想保存更精细的地图,建议设置为0.1。否则建议设置0.2。
# map
globalMapLeafSize: 0.1 # 体素下采样大小 saved map voxgrid size3. 实时建图
# 配置不启用bag
vim LIO-SAM-6AXIS/launch/test_ls16.launch
<arg name="bag_path" default=""/>
# 启动slam
roslaunch lio_sam_6axis test_ls16.launch
# 保存地图
rosservice call /lio_sam_6axis/save_map
# 查看地图
pcl_viewer ~/catkin_ws/src/LIO-SAM-6AXIS/data/xiangyansi/globalmap_lidar_feature.pcd实时建图:

查看点云地图:

四、总结
使用廉价的6轴IMU+16线激光雷达,在低速场景,生成的点云地图可以满足导航时的局部点云定位需求。在长距离场景,增加RTK的位置修正,可以改善IMU里程计误差问题。
相比NDT Mapping或不包含GPS修正的LOAM/LIOM等算法,LIO-SAM在同时包含高耸建筑(多路径干扰)、狭窄道路、宽阔广场(特征少)、树木枝叶密集(GPS信号差)、上方建筑遮挡(完全无GPS信号)环境中,所构建出的地图质量更高,且可以与Google地图完全匹配,方便进行城市级的大地图采集和拼接。
如果你希望将本文中的硬件安装在高速车辆上,建议更换线数更高的激光雷达,其他传感器可以保持不变。有什么问题欢迎留言沟通。
yan 25.9.7