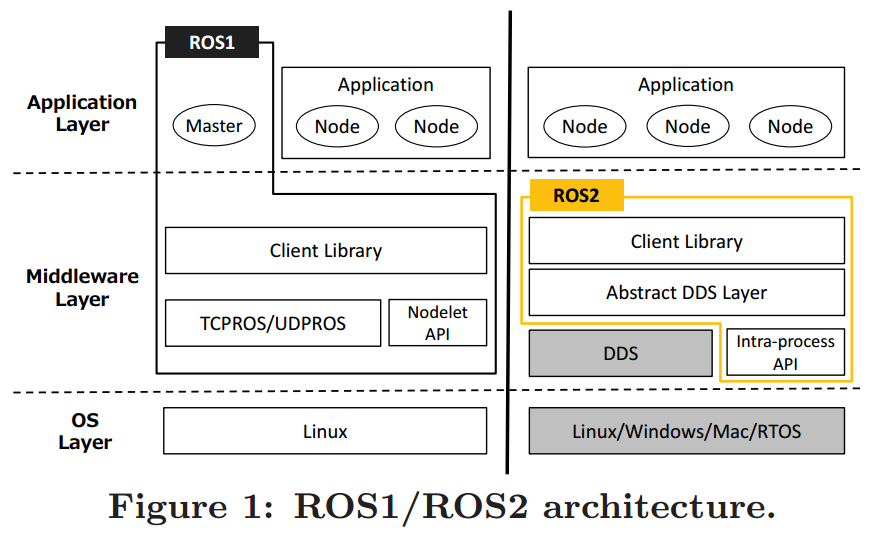
简单点说,ROS2与ROS最大的区别就是:
简单点说,ROS2与ROS最大的区别就是:
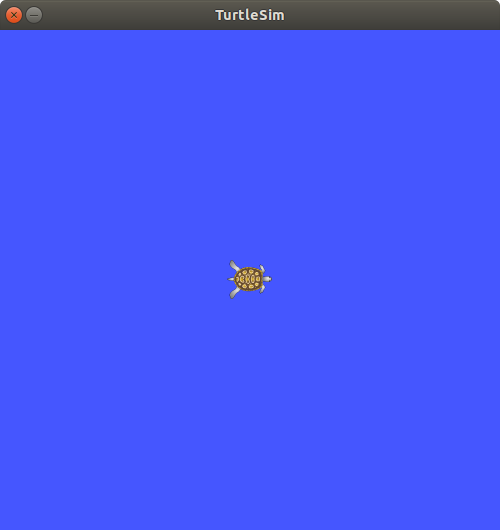
上次我们通过机器人操作系统ROS—初探了解了ROS的基本概念和运行机制,并用内置的小龟模拟器进行了测试。本文我们开始学习如何编写自定义的Service/Client节点进行指定msg格式通信、尝试bag的录制和回放、并简单了解下三维可视化。
温习一下,上一次我们了解到topic里的Message、ROS Services概念:
消息(msg):
msg文件就是一个描述ROS中所使用消息类型的简单文本。它们会被用来生成不同语言的源代码。
一直听到ROS这个名字,很好奇它为什么在机器人领域这么出名,所以从今天起我将从零开始学习一下,看看它到底有哪些神奇之处。本文作为初探篇会先带大家了解ROS的基本概念,通过安装和创建/运行程序包了解Nodes节点、Topics/Msg、Service服务/参数服务器、几个常见的工具。
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。ROS遵守BSD开源许可协议。
ROS的官网:https://ros.org/
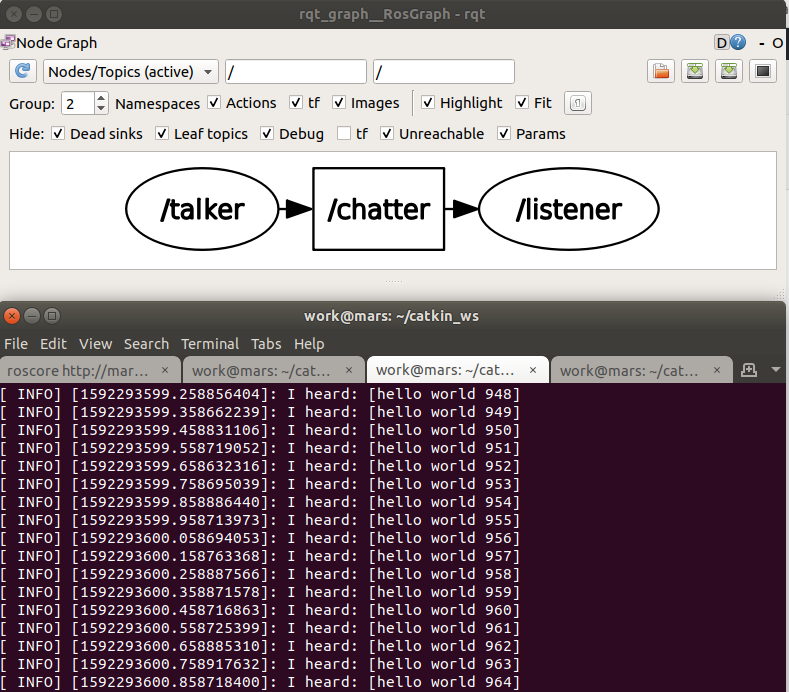
ROS 图(graph)概念:
Nodes:节点,一个节点即为一个可执行文件,它可以通过ROS与其它节点进行通信。

启动一个试验性质的玩具项目:AI哨兵,可自行巡逻,遇到陌生人报警或攻击;认识家人,支持基本的聊天互动和问答。
项目地址:
https://github.com/yanjingang/aisentry
yan 19.7.8