问题描述:
编译autoware simulation_interface库时,报conversions.hpp:53:10: fatal error: zmqpp/zmqpp.hpp: No such file or directory
编译autoware simulation_interface库时,报conversions.hpp:53:10: fatal error: zmqpp/zmqpp.hpp: No such file or directory
open_planner编译报proj_api.h: No such file or directory
在ubuntu22.04上编译autoware autoware_carla_interface库时,报setup.py install is deprecated命令已弃用stderr
在ubuntu22.04上编译autoware时,报TypeError: canonicalize_version() got an unexpected keyword argument ‘strip_trailing_zero’错误
今天教大家一个快速安装ROS环境的方法:
Ubuntu20.04默认apt最高只能安装到python3.9,ros2的autoware对python3.10的新特性有依赖,因此需要升级到3.10+版本。
执行apt时,报Depends: xxx but it is not installed,根据提示运行sudo apt –fix-broken install也无法解决:
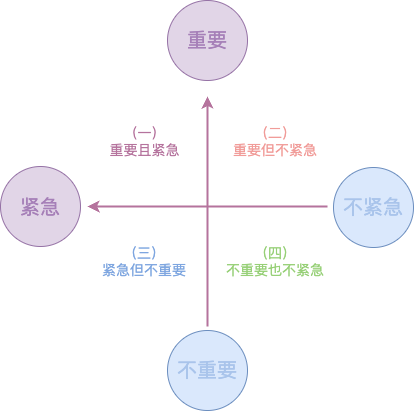
有时看到别人或自己在安排和处理事情上陷入混乱时,我脑海里都忍不住想到系统调度算法,一直想写一下调度算法对我们日常处理事情的启发,今天终于动笔,本文就结合操作系统调度算法,以日常生活做事安排为例,看看是否有值的借鉴的地方。

在进行嵌入式开发的过程中,经常会遇到通信协议是按bit位定义的情况,比如协议一共6个byte字节,每个byte一共8bit位,但是传输的很多数据用1、2个bit就足够了,这时协议会按bit定义,如何方便快捷的进行bit位的赋值和读取,即为本文讲解的内容。