
最近学习ROS,涉及底盘移动等执行机构时,发现买robot套件太贵了,又懒得从pi上直接开发,翻箱倒柜找到一个以前跟儿子一起做的arduino履带坦克,就拿它作ros机器人的action执行机构吧。
最近学习ROS,涉及底盘移动等执行机构时,发现买robot套件太贵了,又懒得从pi上直接开发,翻箱倒柜找到一个以前跟儿子一起做的arduino履带坦克,就拿它作ros机器人的action执行机构吧。
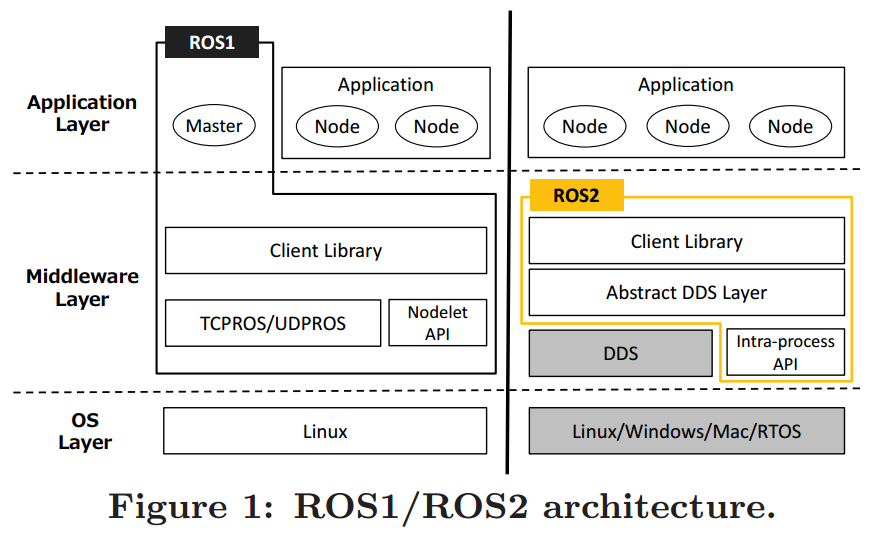
简单点说,ROS2与ROS最大的区别就是:
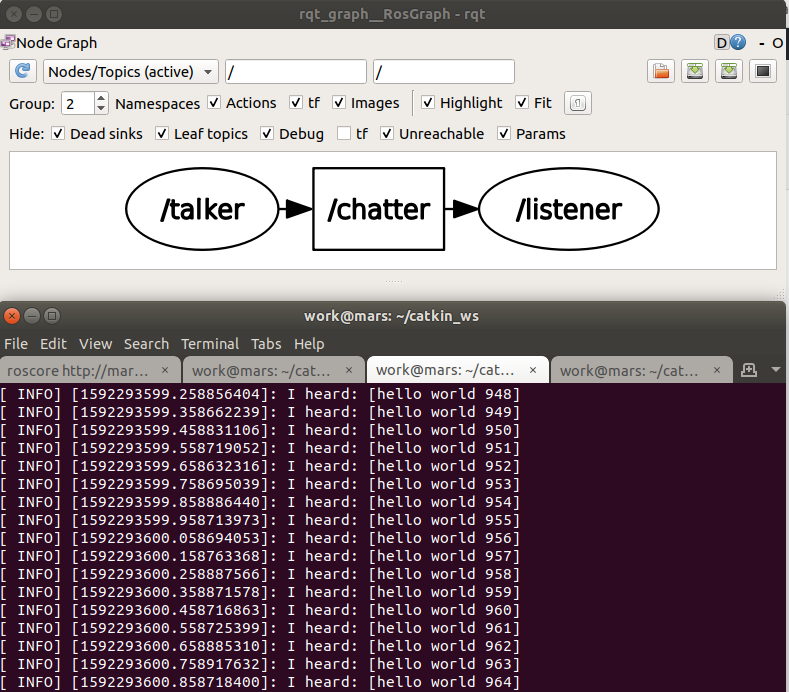
上次我们通过机器人操作系统ROS—初探了解了ROS的基本概念和运行机制,并用内置的小龟模拟器进行了测试。本文我们开始学习如何编写自定义的Service/Client节点进行指定msg格式通信、尝试bag的录制和回放、并简单了解下三维可视化。
温习一下,上一次我们了解到topic里的Message、ROS Services概念:
消息(msg):
msg文件就是一个描述ROS中所使用消息类型的简单文本。它们会被用来生成不同语言的源代码。
一直听到ROS这个名字,很好奇它为什么在机器人领域这么出名,所以从今天起我将从零开始学习一下,看看它到底有哪些神奇之处。本文作为初探篇会先带大家了解ROS的基本概念,通过安装和创建/运行程序包了解Nodes节点、Topics/Msg、Service服务/参数服务器、几个常见的工具。
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。ROS遵守BSD开源许可协议。
ROS的官网:https://ros.org/
ROS 图(graph)概念:
Nodes:节点,一个节点即为一个可执行文件,它可以通过ROS与其它节点进行通信。
随着自动驾驶技术的发展,在未知环境中智能汽车的定位技术成为该领域研究的核心。目前定位技术主要的解决方案是基于全球定位系统(GPS),但是在某些特殊的环境中如下车库,没有 GPS 信号如何解决定位问题就是本文研究的关键所在。
近年来,同步定位与地图构建(Simultaneous Localization and Mapping,SLAM)技术的日益成熟,配合多传感器融合解决方案,自动驾驶车辆在未知环境无 GPS 信号的情况下,完成路径规划的自动驾驶任务得以实现。本文先介绍了自动驾驶系统概述、视觉激光融合的 SLAM 理论与算法,又基于 ROS 框架搭建了自动驾驶汽车的建图与路径规划仿真实验,最后完成了在地库中的实车算法验证实验,并做了论文结论总结与自动驾驶技术的未来展望。
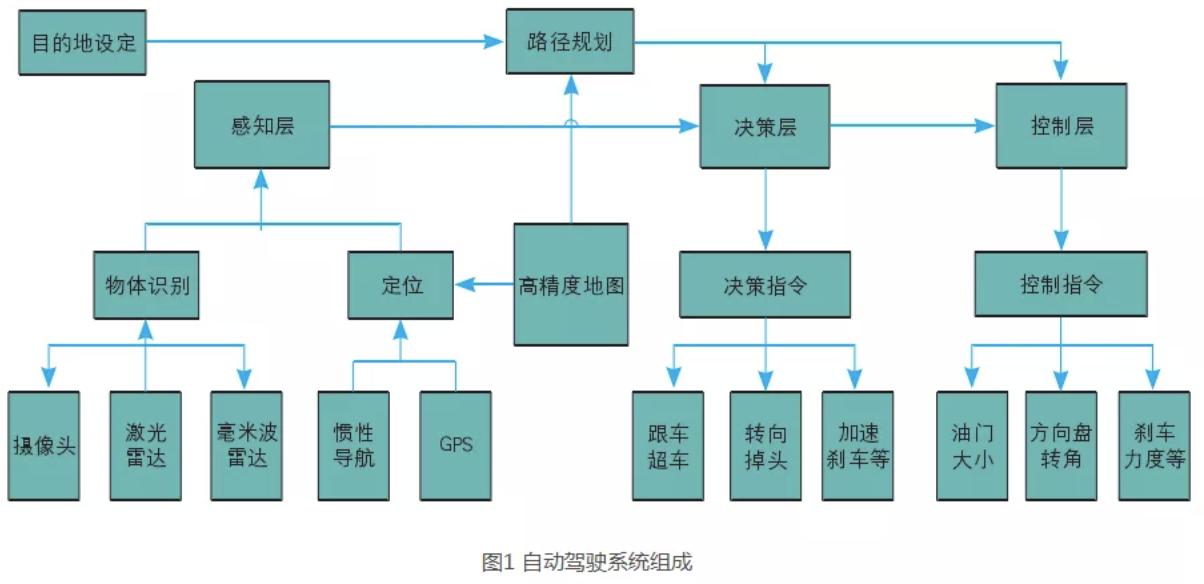
自动驾驶汽车即无人驾驶智能汽车,在没有人为参与的情况下,依靠车内的控制系统与智能算法,通过多重传感器数据融合控制汽车底层协议完成正常的车辆行驶功能。智能驾驶汽车是一个综合的集成系统,包括了自动泊车系统、自动驾驶系统、障碍物停障系统等,又分为了感知层、决策层和控制层三个部分如图 1 所示。
其中感知层包括各路传感器的数据采集、处理与融合等,更加精确和全面的感知周围环境信息。决策层的输入包括感知层的信息、路径的规划以及控制层反馈回来的数据,通过增强学习算法下发决策指令。决策指令包括了循迹、跟车、超车、刹车、转向、调头等等;最终通过控制层下发 CAN 总线下发指令完成智能驾驶汽车的自动驾驶任务,包括油门与刹车的控制、方向盘与挡位的控制等等。
自动驾驶汽车发展与研发中的核心技术是车辆线控技术和车辆精确定位技术。本论文主要分析车辆的精确定位,目前最常用的解决方法就是使用 GPS,可以让汽车实时地得到自身的位置坐标。本文则基于 SLAM 技术研究了一种新的定位方法。
结合 SLAM 技术,自动驾驶汽车的传感器分别由摄像头、激光雷达、车载毫米波雷达、车载超声波雷达、惯导组合、工业控制器等组成,具体的安装位置如图 2 所示。