近期交付项目较多,团队同学出差客户现场或远程与客户直接接触的越来越多,出现一些问题,这里统一梳理明确下与客户相关的注意事项。
客户相关注意事项
发表评论
近期交付项目较多,团队同学出差客户现场或远程与客户直接接触的越来越多,出现一些问题,这里统一梳理明确下与客户相关的注意事项。
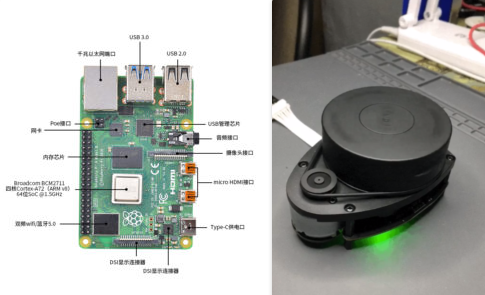
之前学习ros,nvidia jetson nano板子装的ubuntu18.04系统比较正常,但是pi4b的板子装的raspberry系统会出现各种依赖问题。最近想充分利用下几块Pi4B的板子,反复试了pi4安装官方/非官方的ubuntu18.04.5+ROS Melodic版本,最终都会卡在map-server或rviz等依赖上。最终用Pi4B + Ubuntu20.04.3 + ROS Noetic + RpLidar安装测试成功,记录一下安装过程。
开发板平时不连接显示器,放时间久了会自动挂起连不上,解决方法如下: